Nonlinear Controllers Based on Exact Feedback Linearization for Series-Compensated DFIG-Based Wind Parks to Mitigate Sub-Synchronous Control Interaction

Abstract
:1. Introduction
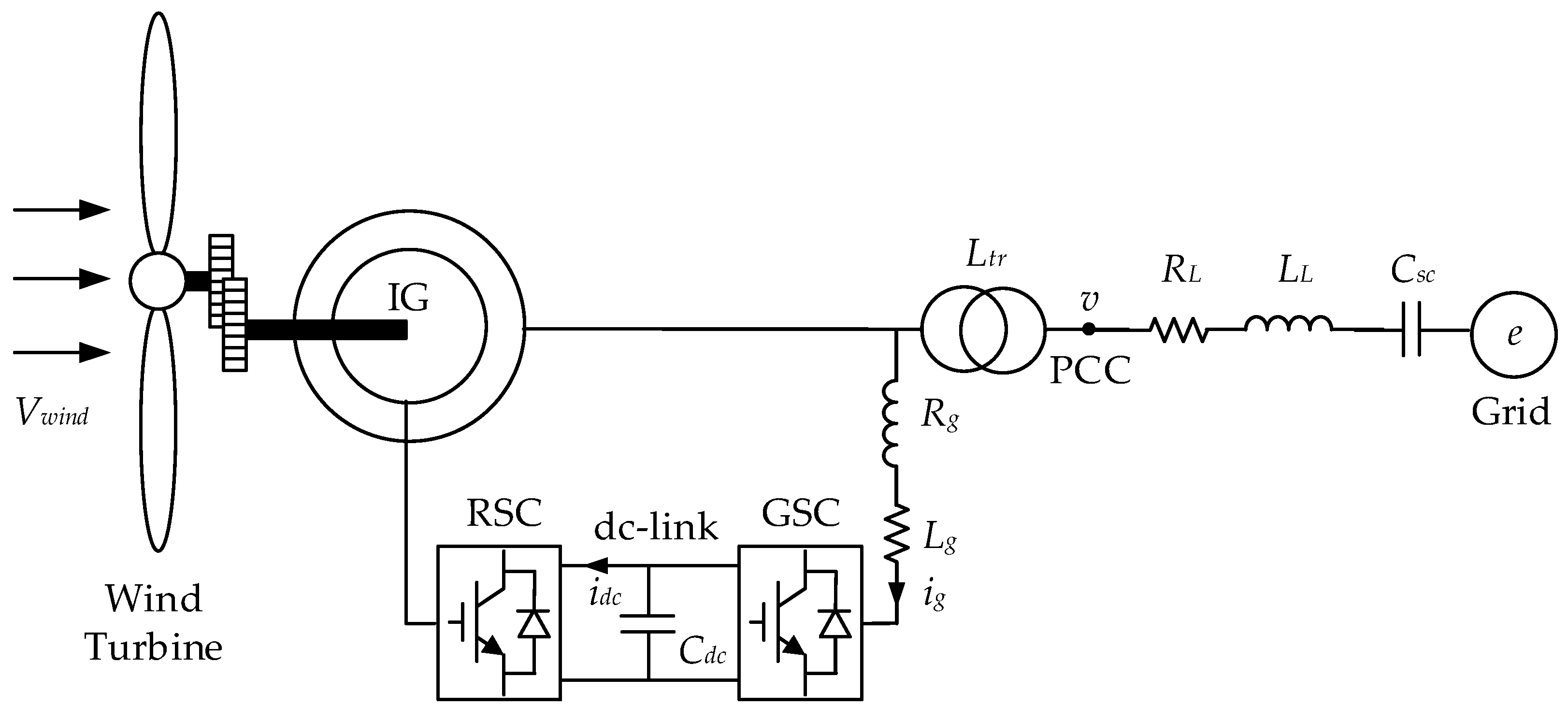
2. Power System Model and PI Controller
2.1. DFIG Model
2.2. GSC Model
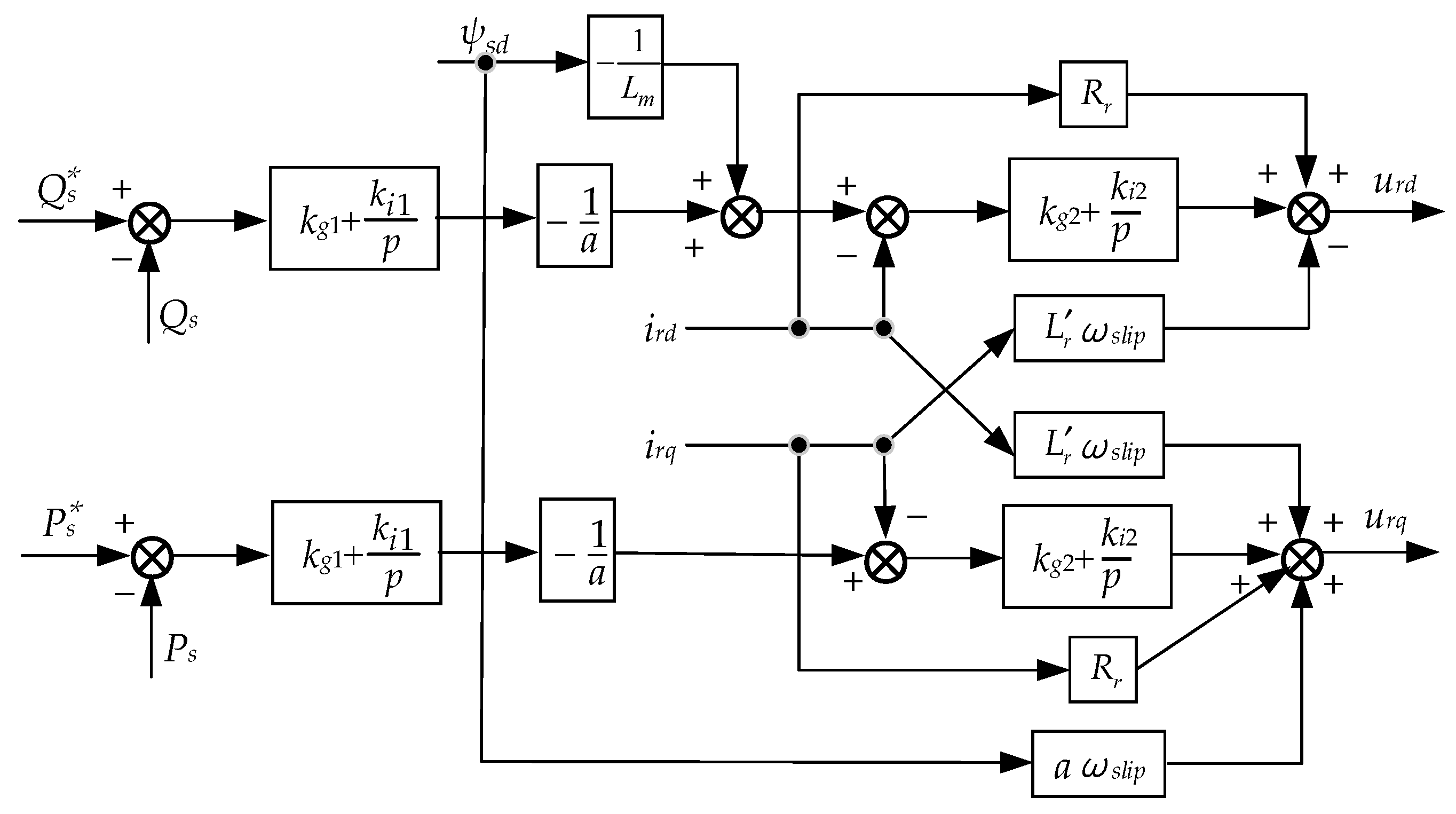
2.3. PI Controller
3. Feedback Linearizability of DFIG-Based Wind Park
3.1. Feedback Linearizability of DFIG
3.2. Feedback Linearizability of GSC
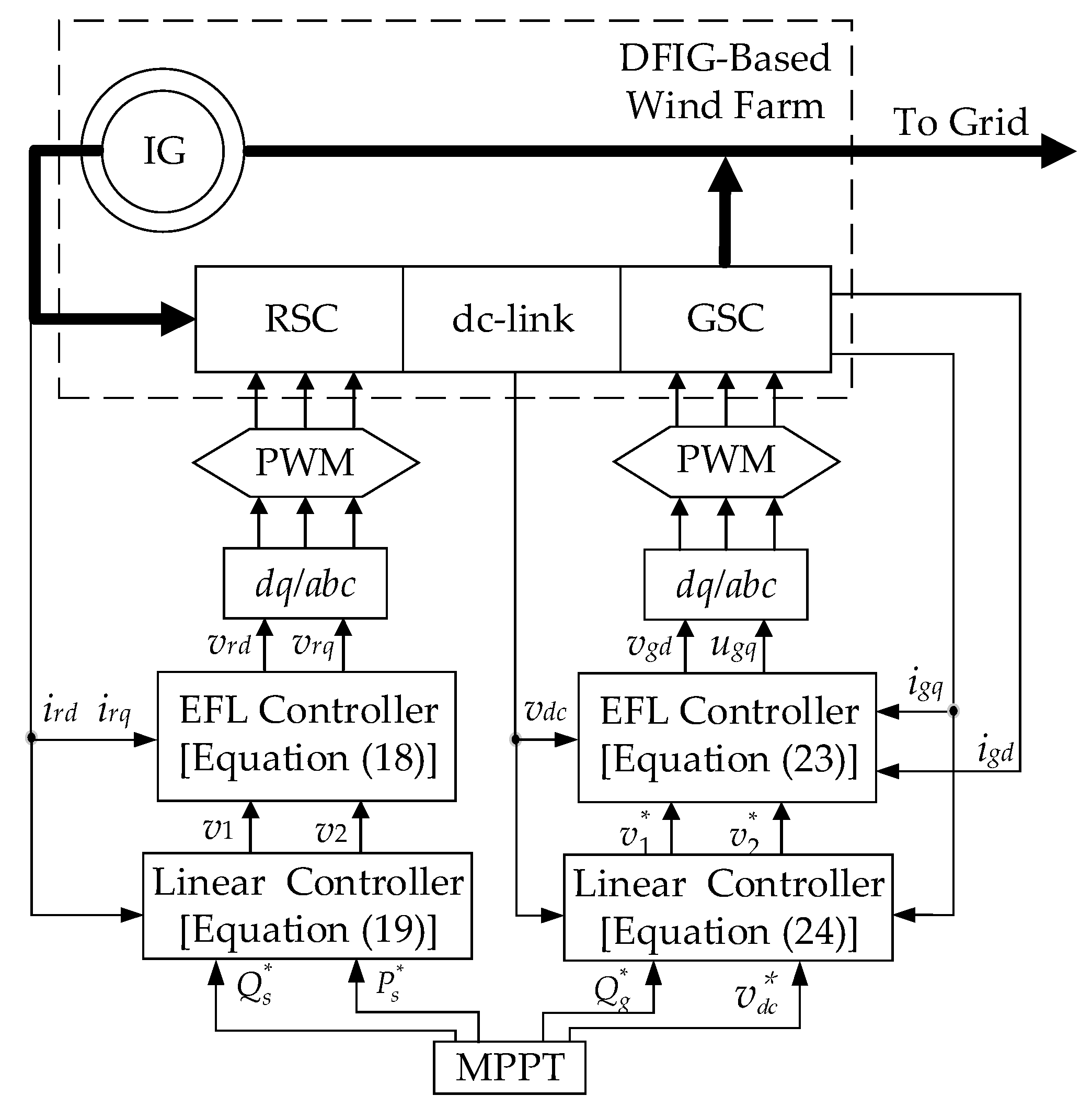
4. Design of Exact Feedback Linearizing Controllers
4.1. RSC Controller Design
4.2. GSC Controller Design
5. Time-domain Simulation Results and Analysis
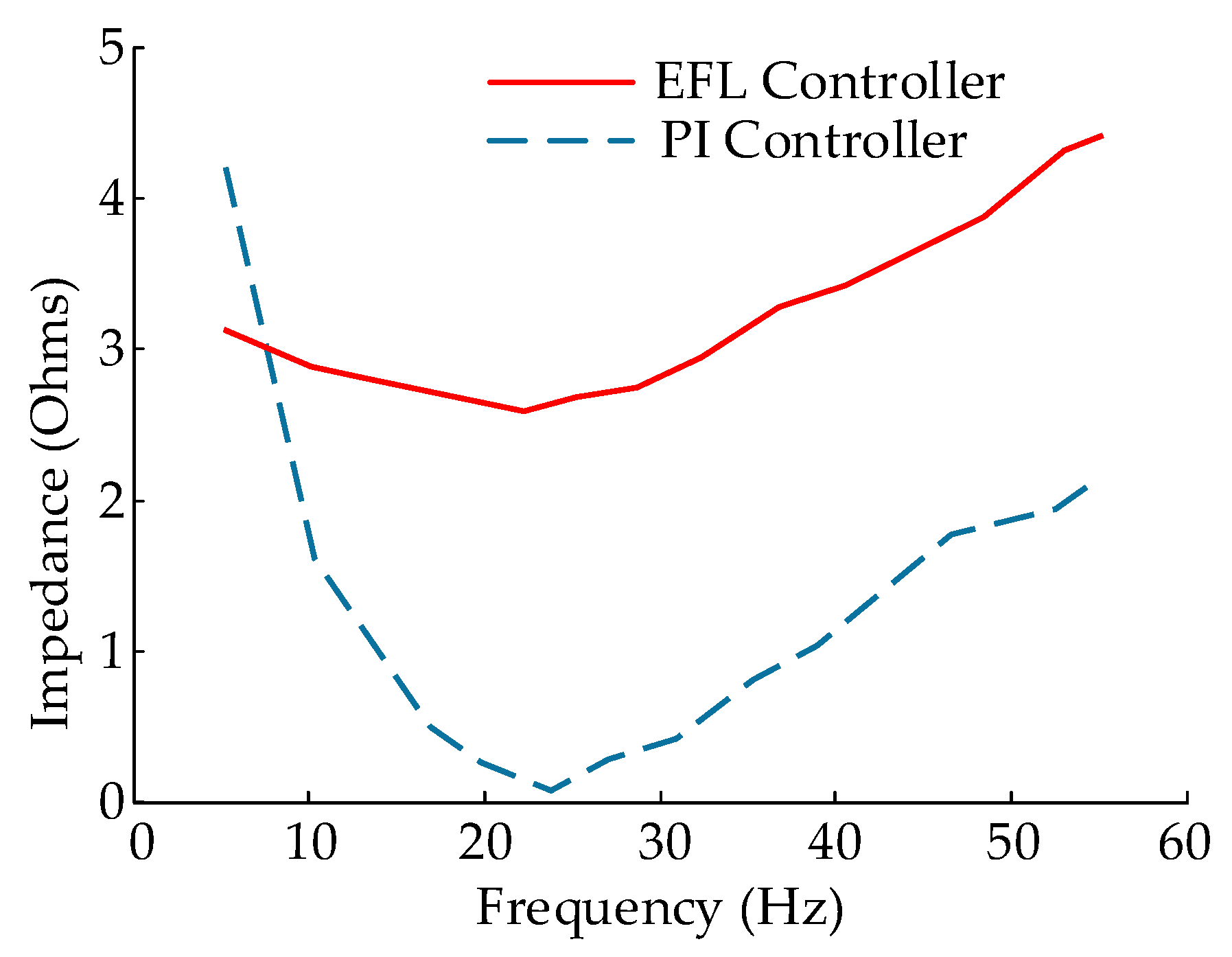
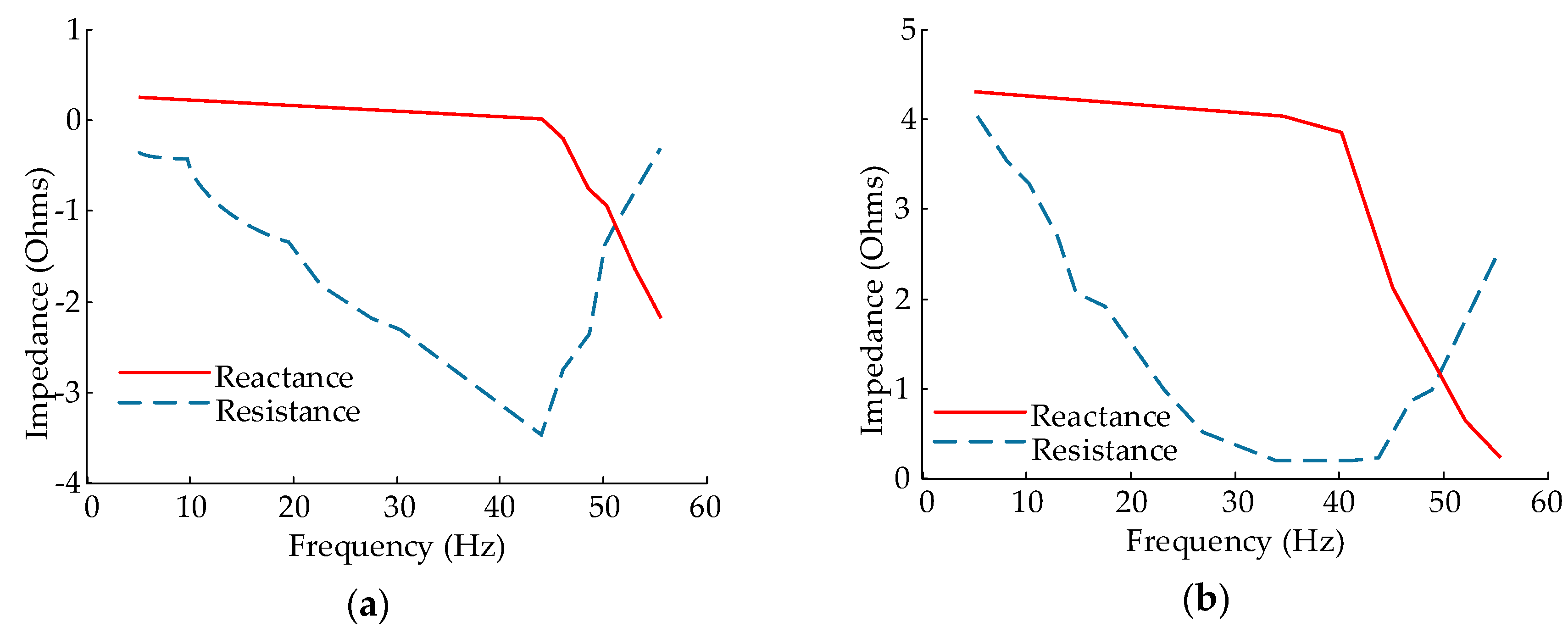
5.1. Frequency Scanning Analysis
5.2. Eigenvalue Analysis
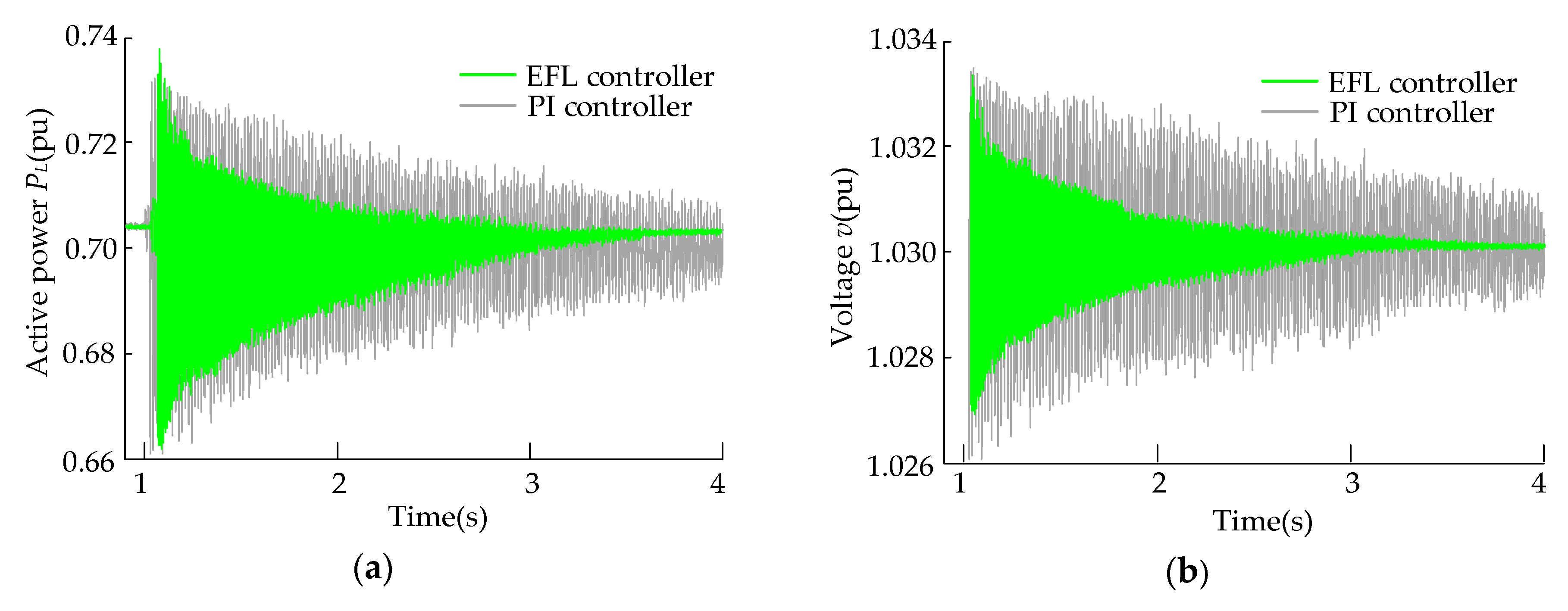
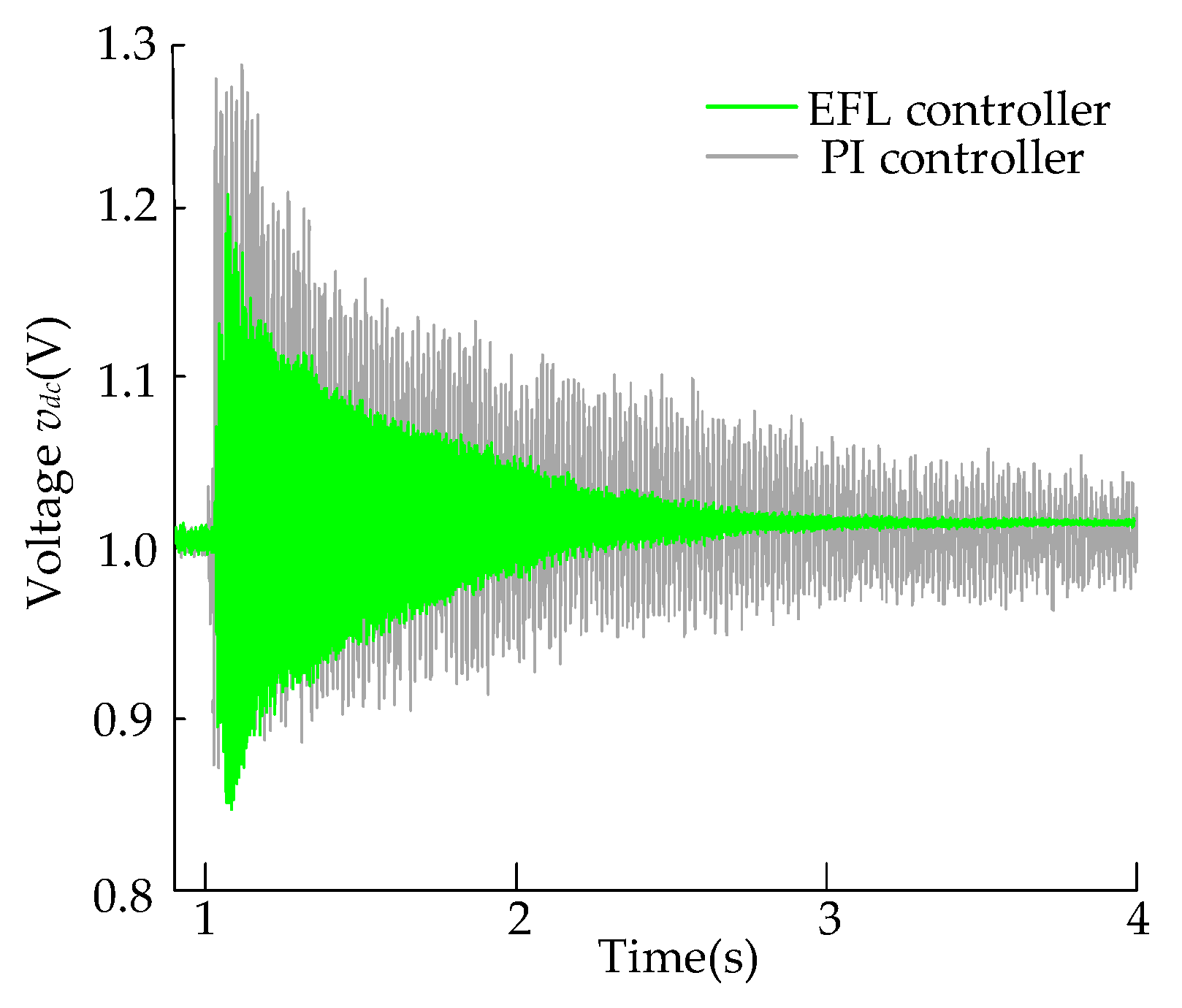
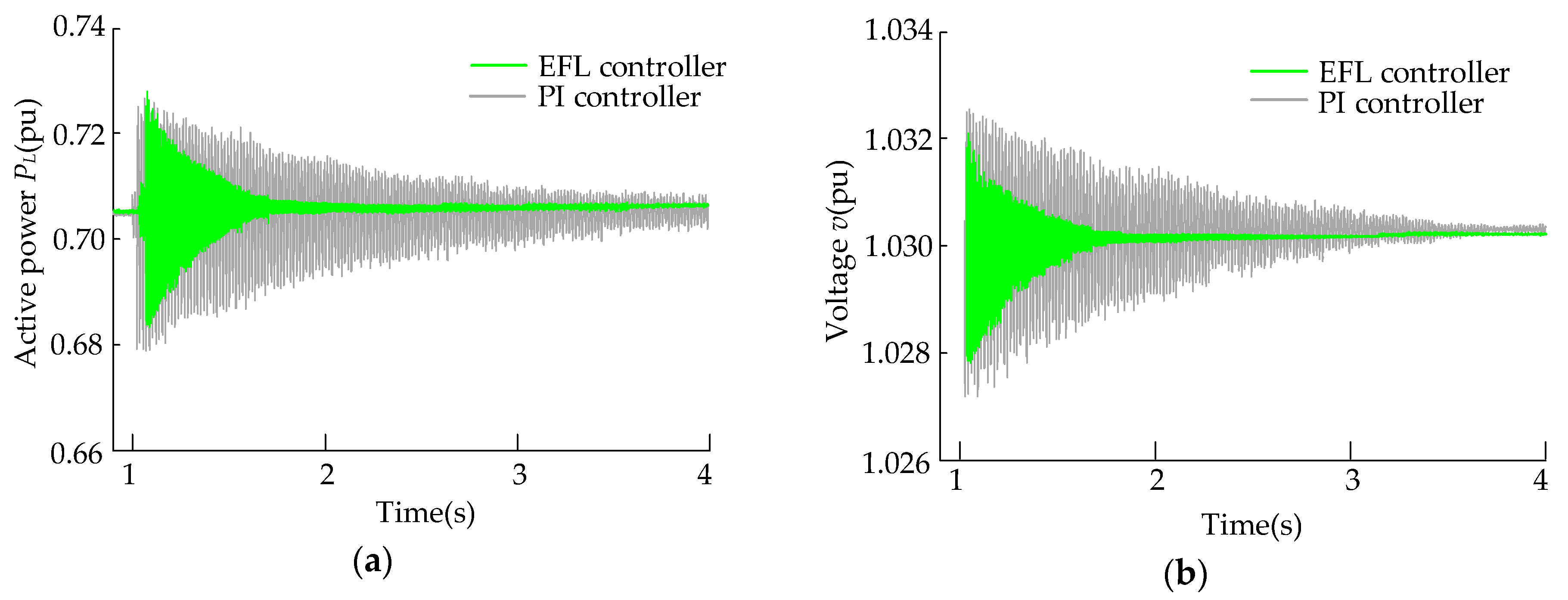
5.3. Time-Domain Simulations and Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Parameter | Symbol |
| Voltage | v |
| Current | i |
| Flux linkage | ψ |
| Resistance | R |
| Inductance | L |
| Grid voltage | e |
| Stator, rotor angular frequencies | ω1, ω |
| Mutual inductance | Lm |
| Transmission line resistance | RL |
| Transmission line inductance | LL |
| Compensator capacitance | Csc |
| DC-link capacitance | Cdc |
| Magnitude of the stator voltage vector | Vs |
| Active power, reactive power | P, Q |
| Input switching signals for the grid side converter | S |
| Subscripts | |
| Stator, rotor | s, r |
| d-axis, q-axis | d, q |
| Grid side converter loop | g |
| Superscripts | |
| Equivalent value | ′ |
| Reference value | * |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Nominal voltage (line to line) | VL-L | 690 | V |
| Nominal power | P | 100 | MW |
| Stator resistance | Rs | 0.0084 | p.u. |
| Rotor resistance | Rr | 0.0083 | p.u. |
| Stator leakage inductance | Lls | 0.167 | p.u. |
| Rotor self-inductance | Llr | 0.1323 | p.u. |
| Mutual inductance | Lm | 5.419 | p.u. |
| dc-link capacitance | Cdc | 10 | mF |
| Nominal dc-link voltage | vdc | 1200 | V |
| Compensator capacitance | Csc | 10 | mF |
| Transmission line resistance | RL | 0.02 | p.u. |
| Transmission line inductance | LL | 0.0016 | p.u. |
| Parameter | Value |
|---|---|
| kg1 | 0.01 |
| ki1 | 0.10 |
| kg2 | 0.10 |
| ki2 | 1.00 |
Appendix B
Appendix C
References
- Chowdhury, M.A.; Shen, W.X.; Hosseinzadeh, N.; Pota, H.R. A novel aggregated DFIG wind farm model using mechanical torque compensating factor. Energy Conver. Manag. 2013, 67, 265–274. [Google Scholar] [CrossRef]
- Thomas, A. Wind Power in Power Systems; John Wiley & Sons, Ltd: West Sussex, UK, 2005. [Google Scholar]
- Mahmud, M.A.; Pota, H.R.; Hossain, M.J. Dynamic Stability of Three-Phase Grid-Connected Photovoltaic System Using Zero Dynamic Design Approach. IEEE J. Photovolt. 2012, 2, 564–571. [Google Scholar] [CrossRef]
- Mohammadpour, H.A.; Santi, E. SSR Damping Controller Design and Optimal Placement in Rotor-Side and Grid-Side Converters of Series-Compensated DFIG-Based Wind Farm. IEEE Trans. Sustain Energy 2015, 6, 388–399. [Google Scholar] [CrossRef]
- Wang, L.; Xie, X.; Jiang, Q.; Liu, H.; Li, Y.; Liu, H. Investigation of SSR in Practical DFIG-Based Wind Farms Connected to a Series-Compensated Power System. IEEE Trans. Power Syst. 2015, 30, 2772–2779. [Google Scholar] [CrossRef]
- Mohammadpour, H.A.; Santi, E. Sub-synchronous resonance analysis in DFIG-based wind farms: Definitions and problem identification—Part I. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014. [Google Scholar]
- Padiar, K.R. Analysis of Sub-Synchronous Resonance in Power Systems; Kluwer Academic Publishers (KAP): Boston, MA, USA, 1999. [Google Scholar]
- IEEE SSR Working Group. Terms, definitions and symbols for subsynchronous oscillations. IEEE Trans. Power Appl. Syst. 1985, 6, 1326–1334. [Google Scholar]
- Gross, L.C. Sub-Synchronous Grid Conditions: New Event, New Problem, and New Solutions. In Proceedings of the Western Protective Relay Conference, Spokane, WA, USA, 19–21 October 2010. [Google Scholar]
- Sahni, M.; Badrzadeh, B.; Muthumuni, D.; Cheng, Y.; Yin, H.; Huang, S. Sub-synchronous interaction in Wind Power Plants part II: An ERCOT case study. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012. [Google Scholar]
- Irwin, G.D.; Jindal, A.K.; Isaacs, A.L. Sub-Synchronous Control Interactions between Type 3 Wind Turbines and Series Compensated AC Transmission Systems. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011. [Google Scholar]
- Kidd, D.; Hassink, P. Transmission Operator Perspective of SubSynchronous Interaction. In Proceedings of the 2012 IEEE PES Transmission and Distribution Conference and Exposition (T&D), Orlando, FL, USA, 7–10 May 2012. [Google Scholar]
- Hingorani, N.G.; Gyugi, L. Understanding FACTS; IEEE Press: Piscataway, NJ, USA, 2000. [Google Scholar]
- Adrees, A.; Milanović, J.V. Optimal Compensation of Transmission Lines Based on Minimisation of the Risk of Subsynchronous Resonance. IEEE Trans. Power Syst. 2016, 31, 1038–1047. [Google Scholar] [CrossRef]
- Gupta, S.K.; Gupta, A.K.; Kumar, N. Damping subsynchronous resonance in power systems. IEE Proc. Gener. Transm. Distrib. 2002, 149, 679–688. [Google Scholar] [CrossRef]
- Daneshpooy, A.; Gole, A.M. Frequency response of the thyristor controlled series capacitor. IEEE Trans. Power Del. 2001, 16, 53–58. [Google Scholar] [CrossRef]
- Mohammadpour, H.A.; Ghaderi, A.; Santi, E. Analysis of SSR in DFIG-based wind farms interfaced with gate-controlled series capacitor. IET Gener. Transm. Dis. 2014, 8, 1998–2011. [Google Scholar] [CrossRef]
- El Moursi, M.S.; Khadkikar, V. Novel control strategies for SSR mitigation and damping power system oscillations in a series compensated wind park. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar]
- Rajaram, T.; Reddy, J.M.; Xu, Y. Kalman Filter Based Detection and Mitigation of Subsynchronous Resonance with SSSC. IEEE Trans. Power Syst. 2017, 32, 1400–1409. [Google Scholar]
- Fan, L.; Miao, Z. Mitigating SSR Using DFIG-Based Wind Generation. IEEE Trans. Sustain. Energy 2012, 3, 349–358. [Google Scholar] [CrossRef]
- Leon, A.E. Integration of DFIG-Based Wind Farms into Series-Compensated Transmission Systems. IEEE Trans. Sustain. Energy 2016, 7, 451–460. [Google Scholar] [CrossRef]
- Faried, S.O.; Unal, I.; Rai, D.; Mahseredjian, J. Utilizing DFIG-Based Wind Farms for Damping Subsynchronous Resonance in Nearby Turbine-Generators. IEEE Trans. Power Syst. 2013, 28, 452–459. [Google Scholar] [CrossRef]
- Huang, P.H.; Moursi, M.S.E.; Xiao, W.; Kirtley, J.L. Subsynchronous Resonance Mitigation for Series-Compensated DFIG-Based Wind Farm by Using Two-Degree-of-Freedom Control Strategy. IEEE Trans. Power Syst. 2015, 30, 1442–1454. [Google Scholar] [CrossRef]
- Leon, A.E.; Solsona, J.A. Sub-Synchronous Interaction Damping Control for DFIG Wind Turbines. IEEE Trans. Power Syst. 2015, 30, 419–428. [Google Scholar] [CrossRef]
- Dattaray, P.; Chakravorty, D.; Wall, P.; Yu, J.; Terzija, V. A Novel Control Strategy for Subsynchronous Resonance Mitigation using 11kV VFD based Auxiliary Power Plant Loads. IEEE Trans. Power Del. 2017, 99, 1. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; Li, Y.; Liu, H.; Hu, Y. Damping Subsynchronous Resonance in Series Compensated Wind Farms by Adding Notch Filters to DFIG Controllers. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Bangkok, Thailand, 3–6 November 2015. [Google Scholar]
- Adams, J.; Carter, C.; Huang, H. ERCOT Experience with Sub-Synchronous Control Interaction and Proposed Remediation. In Proceedings of the 2012 IEEE PES Transmission and Distribution Conference and Exposition (T&D), Orlando, FL, USA, 7–10 May 2012. [Google Scholar]
- Chowdhury, M.A.; Mahmud, M.A.; Shen, W.; Pota, H.R. Nonlinear Controller Design for Series-Compensated DFIG-Based Wind Farms to Mitigate Subsynchronous Control Interaction. IEEE Trans. Energy Convers. 2017, 32, 707–719. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Pota, H.R.; Hossain, M.J. Nonlinear DSTATCOM controller design for distribution network with distributed generation to enhance voltage stability. Int. J. Electr. Power Energy Syst. 2013, 53, 974–979. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Hossain, M.J.; Pota, H.R.; Roy, N.K. Nonlinear Controller Design for Vehicle-To-Grid (V2G) Systems to Enhance Power Quality and Power System Stability. In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 24–29 August 2014. [Google Scholar]
- Mahmud, M.A.; Hossain, M.J.; Pota, H.R. Robust Nonlinear Distributed Controller Design for Active and Reactive Power Sharing in Islanded Microgrids. IEEE Trans. Energy Convers. 2014, 29, 893–903. [Google Scholar] [CrossRef]
- Mohammadpour, H.A.; Santi, E. Modeling and Control of Gate-Controlled Series Capacitor Interfaced with a DFIG-Based Wind Farm. IEEE Trans. Ind. Electron. 2015, 62, 1022–1033. [Google Scholar] [CrossRef]
- Gao, B.; Liu, J.; Li, R.; Zhao, S. Studies of Sub-Synchronous Control Interaction in Wind Turbine Generators. Trans. China Electrotech. Soc. 2015, 30, 154–161. [Google Scholar]









| Vwind (m/s) | Mode 1 EFL | PI | Mode 2 EFL | PI | Mode 3 EFL | PI |
|---|---|---|---|---|---|---|
| 8 | −9.1 ± j629.3 | −8.0 ± j628.8 | −1.4 ± j147.7 | +1.9 ± j148.3 | −16.1 ± j94.9 | −11.5 ± j94.1 |
| 9 | −8.2 ± j628.9 | −7.6 ± j628.9 | −2.9 ± j145.6 | +0.7 ± j145.0 | −7.4 ± j58.2 | −6.8 ± j58.2 |
| 10 | −7.5 ± j627.6 | −7.3 ± j629.1 | −5.0 ± j144.2 | −0.9 ± j141.9 | −6.2 ± j22.4 | −5.7 ± j22.2 |
| 11 | −7.1 ± j627.0 | −6.9 ± j629.0 | −6.9 ± j143.3 | −9.9 ± j141.2 | −4.9 ± j22.0 | −4.7 ± j21.6 |
| K (%) | Mode 1 EFL | PI | Mode 2 EFL | PI | Mode 3 EFL | PI |
|---|---|---|---|---|---|---|
| 30 | −5.9 ± j524.5 | −5.5 ± j522.6 | −4.6 ± j231.1 | −2.1 ± j230.6 | −7.0 ± j95.7 | −4.3 ± j95.1 |
| 50 | −7.9 ± j581.3 | −6.7 ± j580.0 | −3.0 ± j173.5 | −1.5 ± j172.3 | −9.7 ± j94.5 | −6.1 ± j95.2 |
| 70 | −9.1 ± j629.3 | −8.0 ± j628.8 | −1.4 ± j147.7 | +1.9 ± j148.3 | −16.1 ± j94.9 | −11.5 ± j94.1 |
| 90 | −9.7 ± j653.1 | −8.8 ± j652.6 | +3.0 ± j111.2 | +5.8 ± j109.7 | −22.0 ± j87.6 | −16.0 ± j86.4 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Wang, J.; Xiong, L.; Wu, F. Nonlinear Controllers Based on Exact Feedback Linearization for Series-Compensated DFIG-Based Wind Parks to Mitigate Sub-Synchronous Control Interaction. Energies 2017, 10, 1182. https://doi.org/10.3390/en10081182
Li P, Wang J, Xiong L, Wu F. Nonlinear Controllers Based on Exact Feedback Linearization for Series-Compensated DFIG-Based Wind Parks to Mitigate Sub-Synchronous Control Interaction. Energies. 2017; 10(8):1182. https://doi.org/10.3390/en10081182
Chicago/Turabian StyleLi, Penghan, Jie Wang, Linyun Xiong, and Fei Wu. 2017. "Nonlinear Controllers Based on Exact Feedback Linearization for Series-Compensated DFIG-Based Wind Parks to Mitigate Sub-Synchronous Control Interaction" Energies 10, no. 8: 1182. https://doi.org/10.3390/en10081182