Modeling, Analysis and Experimental Validation of the Fuel Cell Association with DC-DC Power Converters with Robust and Anti-Windup PID Controller Design


Abstract
:1. Introduction
- (1)
- Rigorous study and analysis of the association between a Proton Exchange Membrane Fuel Cell (PEMFC) and a DC converter (including buck and boost topologies) is conducted. Each power converter coupled with the fuel cell is mathematically modeled using a large signal model, which is linearized; in addition, the transfer function is elaborated. Equilibrium point analysis reveals that the selection of the reference signal of the DC bus voltage and load resistance (which represents the power consumption of all loads connected to the DC bus) is crucial to make the association feasible in practice.
- (2)
- A robust PID controller with anti-windup scheme is proposed and analyzed. Using absolute stability tools, sufficient conditions are established for the closed loop system to be L2-stable. If these conditions are respected after choosing the PID parameters, the regulator is then able to ensure the objectives of closed-loop stability, output reference tracking, and robustness against perturbations. Numerous previous studies do not consider the problem of saturation in the input of DC-DC converters and ignore the main issue of the integrator presented in digital PI and PID controllers, which negatively affects the system performance. This work considers this feature and presents rigorous analyses taking into account these aspects.
- (3)
- The analysis and the controller design are carried out taking into account the fuel cell dynamic and its nonlinear characteristic.
- (4)
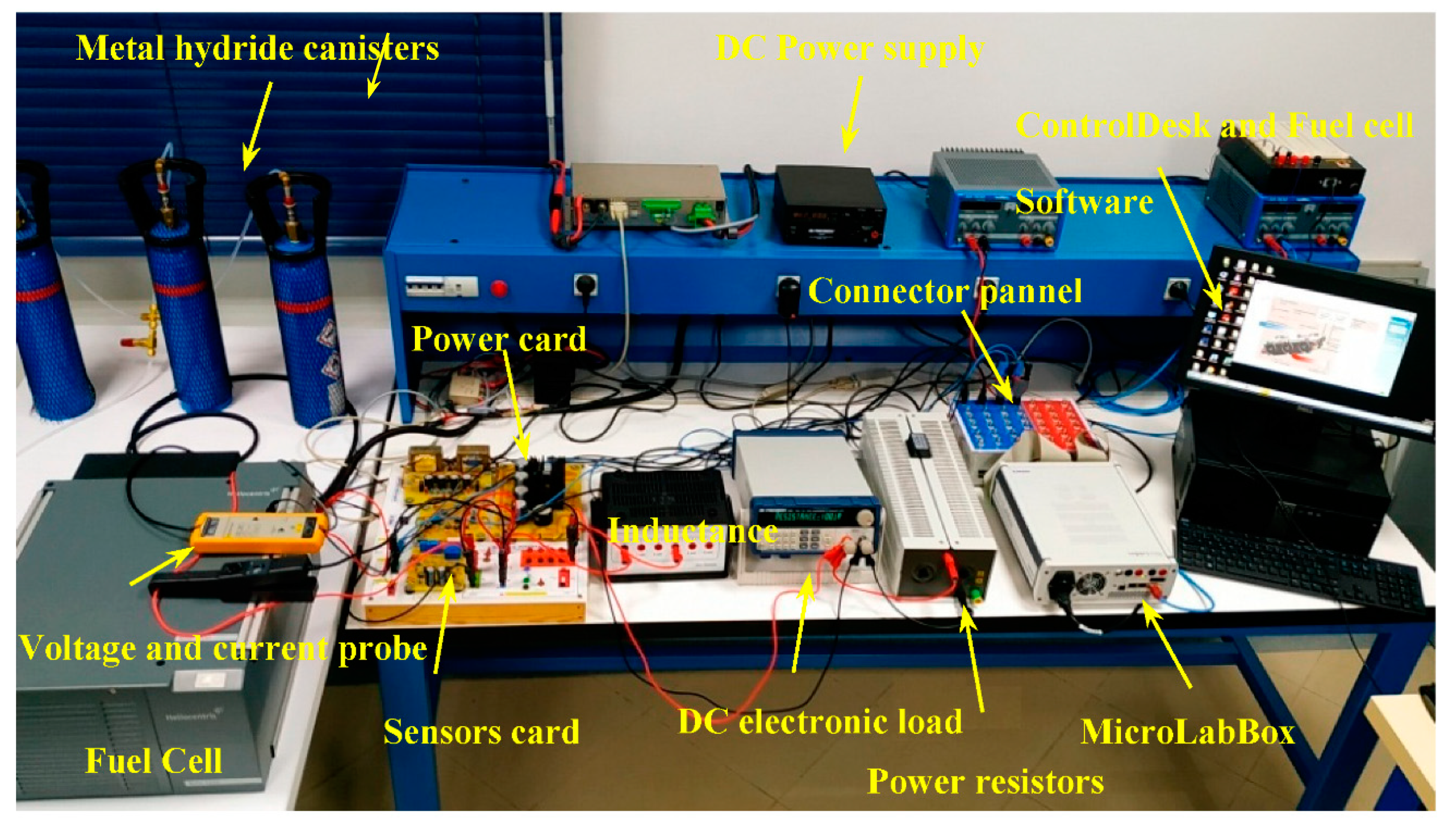
- The experimental test bench of the association comprising a 1.2 kW PEMFC fuel cell linked to DC-DC converters is developed and the control system is implemented using MicrolabBox-DSPACE DS1202 to confirm the theoretical analysis.
2. Fuel Cell and DC-DC Power Converters—Presentation, Modeling and Analysis
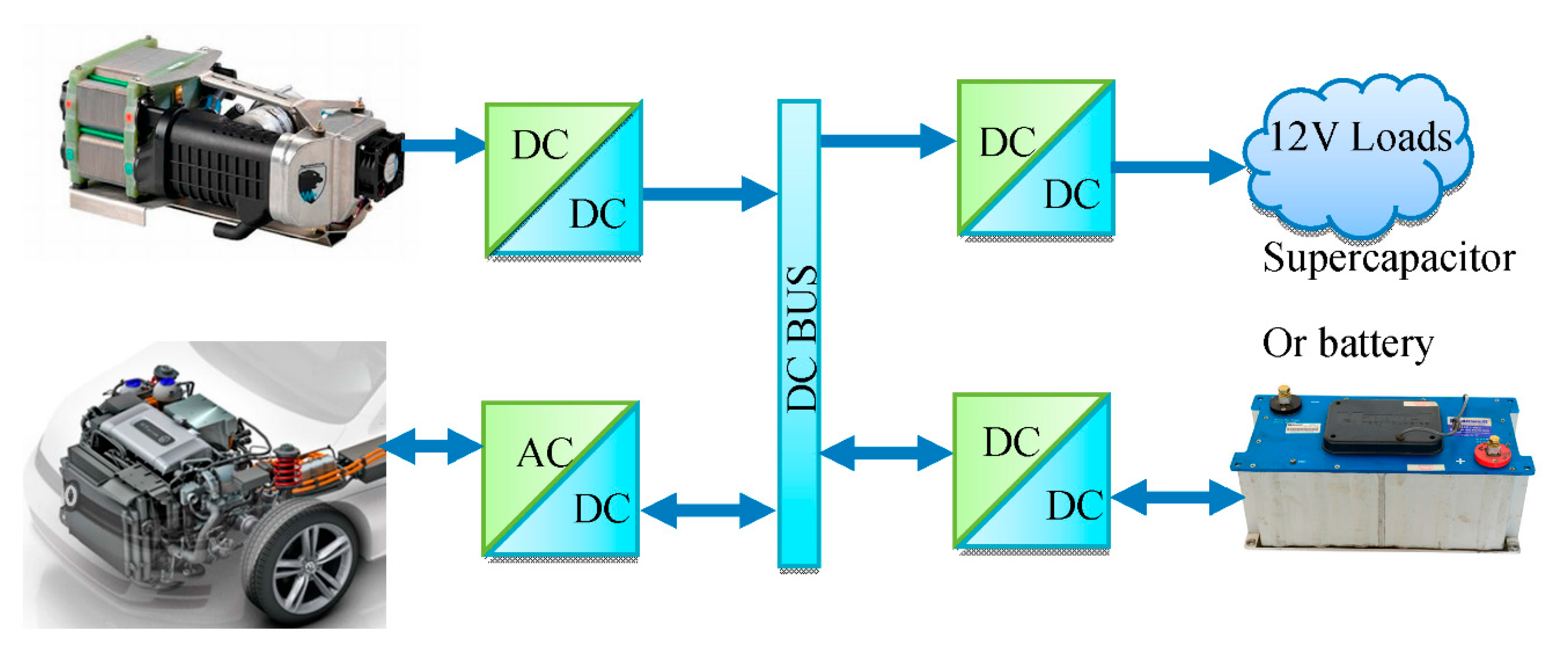
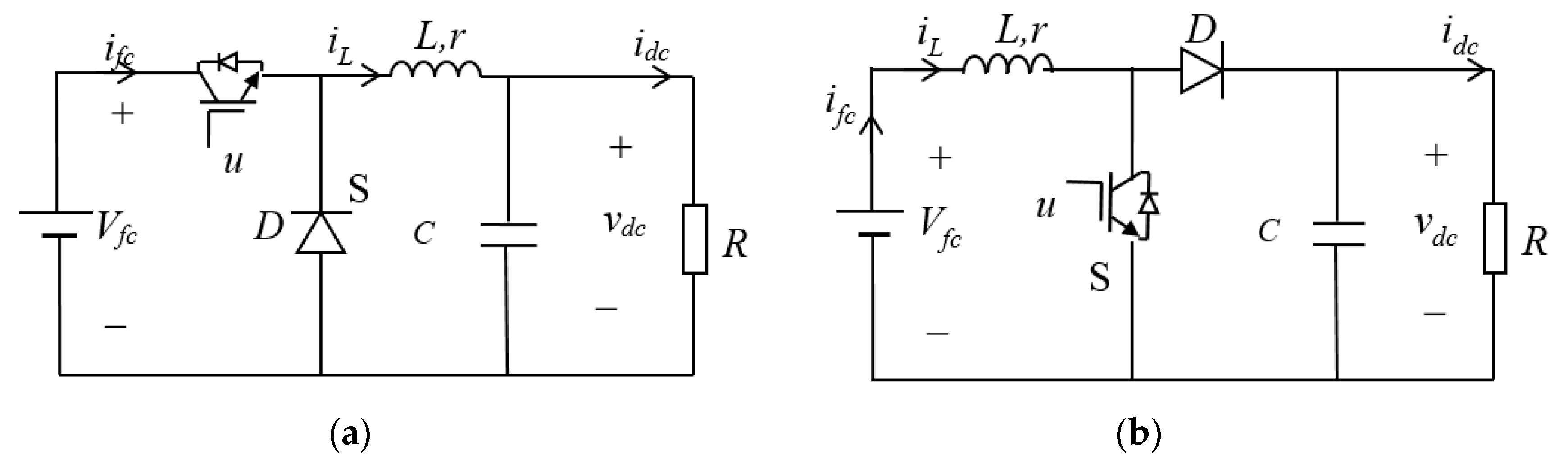
2.1. DC-DC Power Converters Presentation
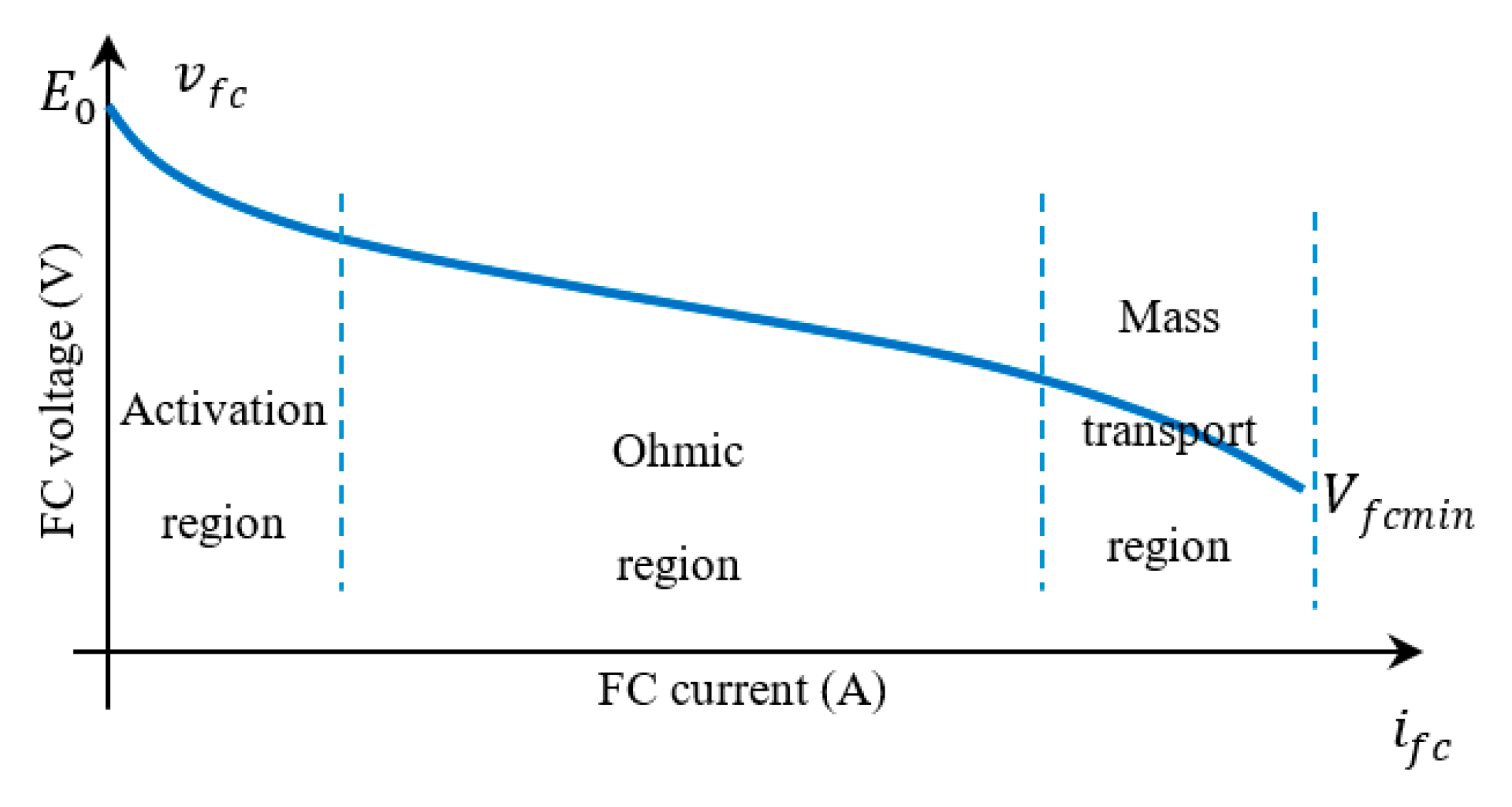
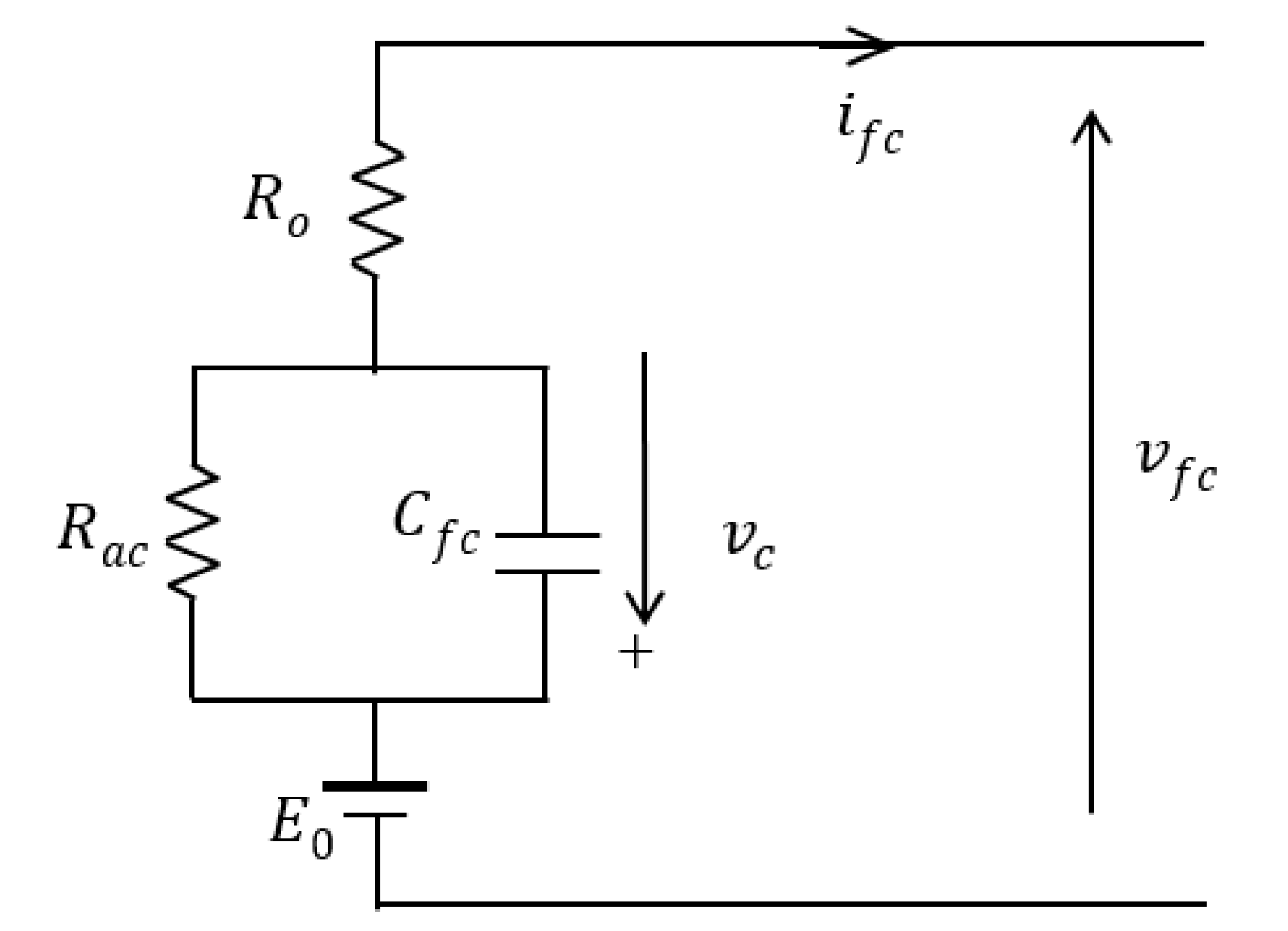
2.2. Fuel Cell Modeling
2.3. Modeling and Analysis of the FC-Buck System
2.4. Modeling and Analysis of the FC-Boost System
3. Controller Design and Stability Analysis
3.1. PID Controller with Anti-Windup
3.2. Tracking Performance Achievement
- (1)
- ,,,
- (2)
- (3)
- (1)
- The constrained system (59) modeling the fuel cell and DC-DC converter association, where w(t) is any bounded disturbance satisfying (60).
- (2)
- The saturated controller (66) and (67), where the referenceis any bounded reference signal () satisfying (70), and (and) are any Hurwitz polynomials of the form (74) and (75). If the operatorsatisfies the real positive condition (86), then, the tracking errorand the deviationbetween the computed and the applied controls both vanish asymptotically
3.3. Practical Considerations for Determining PID Parameters
- (1)
- Chose the polynomial to ensure (86).
- (2)
- Solve a system (110)–(114) to obtain , ensure that and , else return to (1) to modify .
- (3)
- Using (62)–(64), determine the parameters, and of the PID controller as follows:,; .
4. Simulation Results
4.1. System Parameters
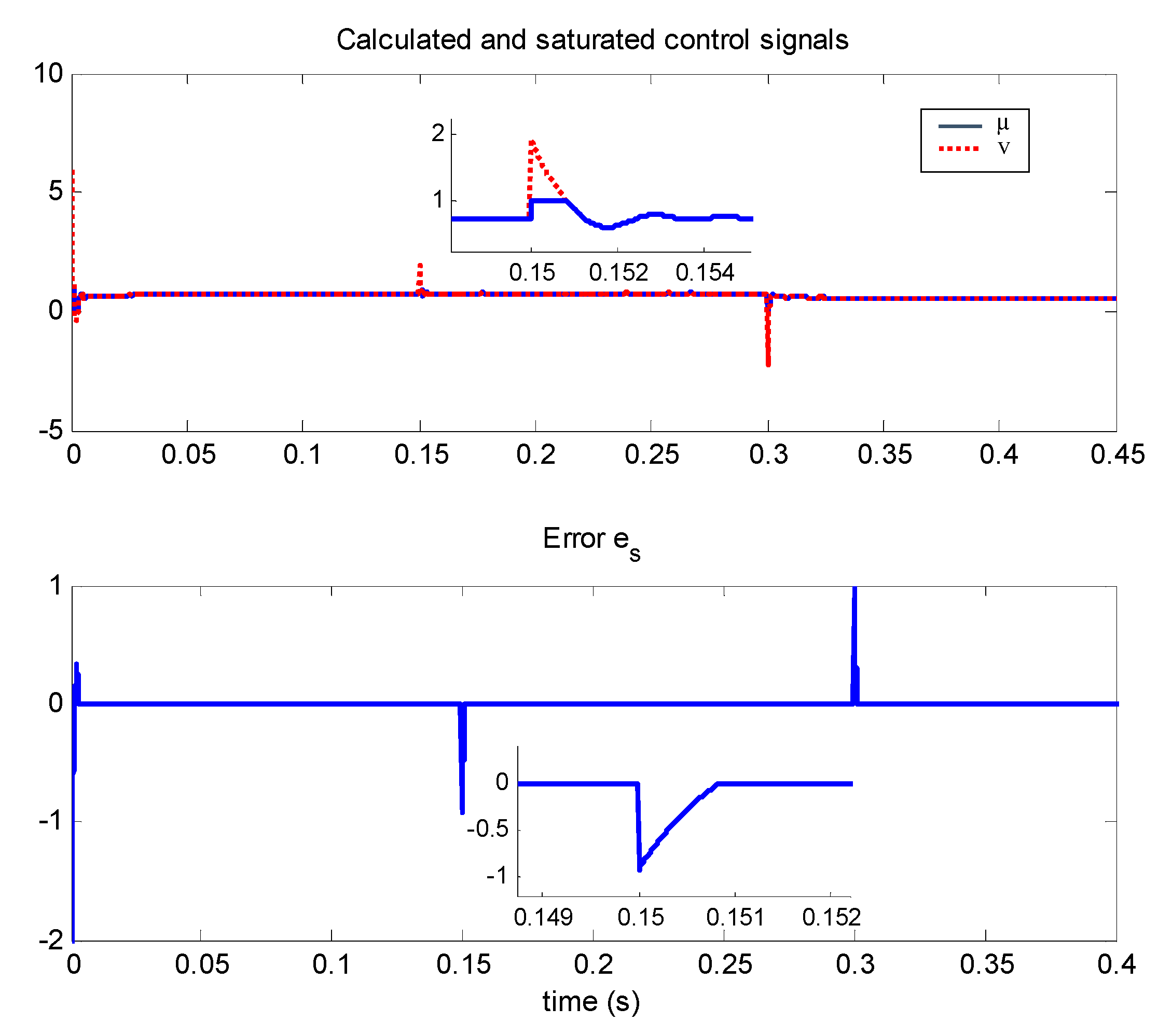
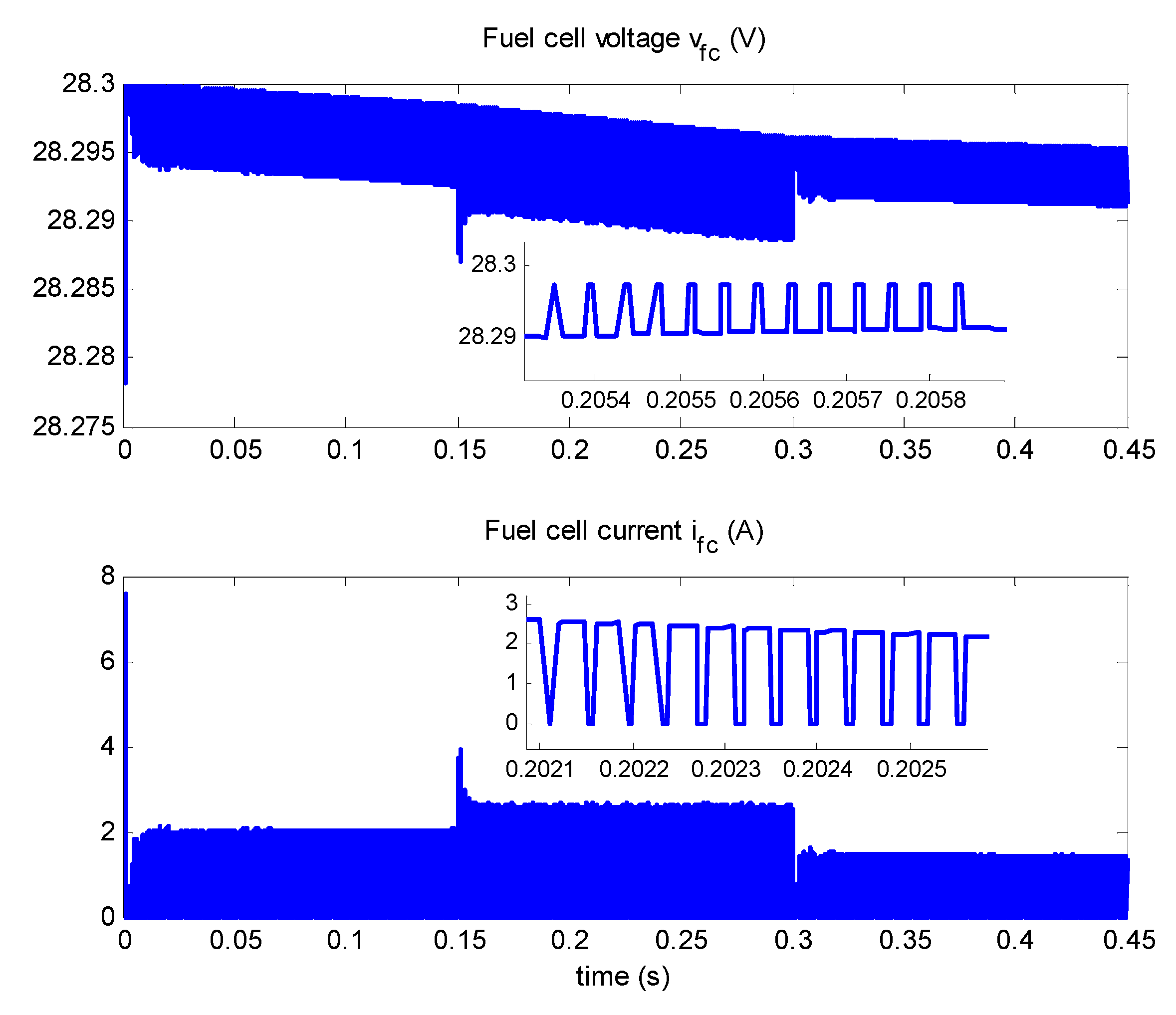
4.2. Simulation of the FC-Buck Association
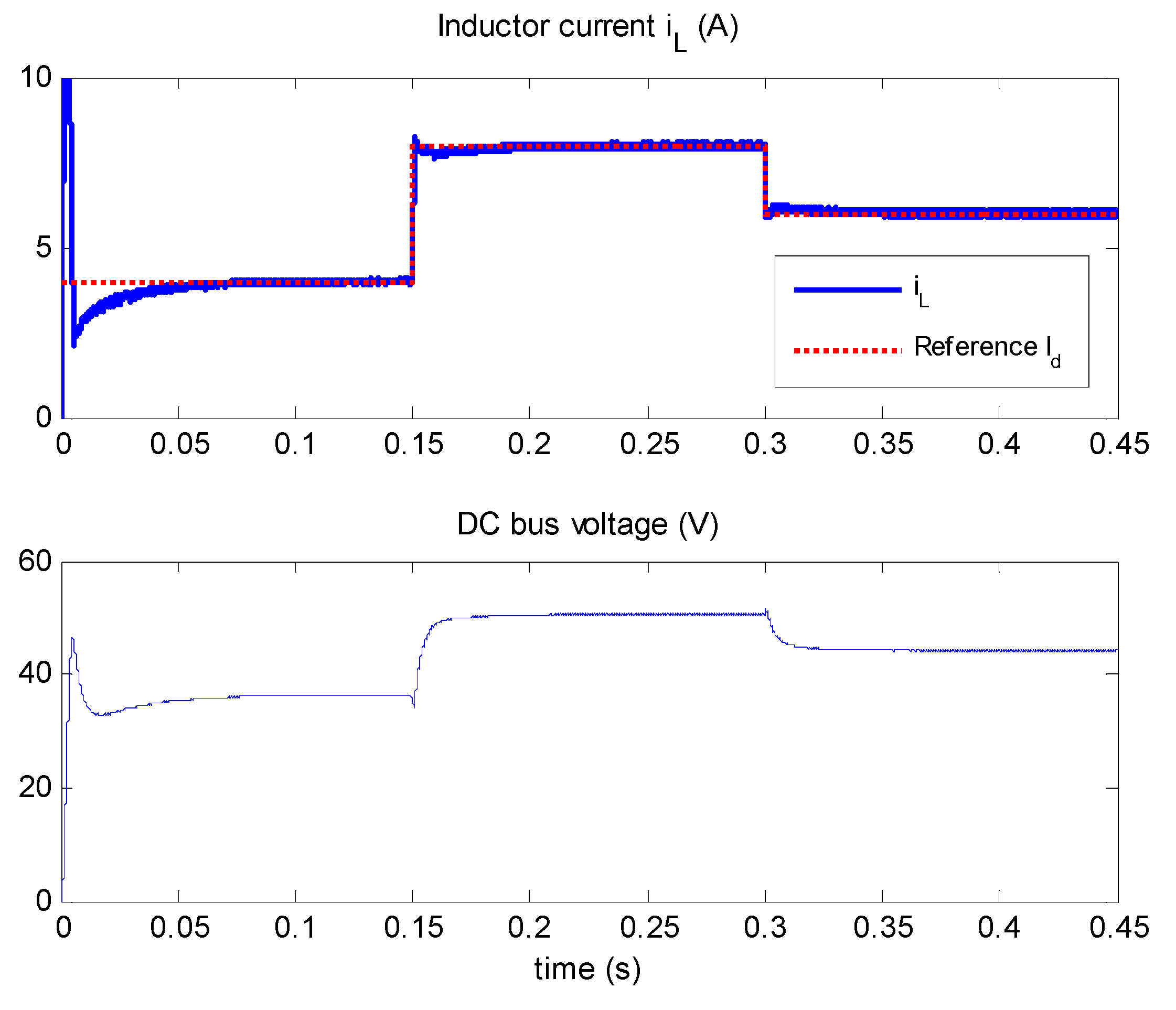
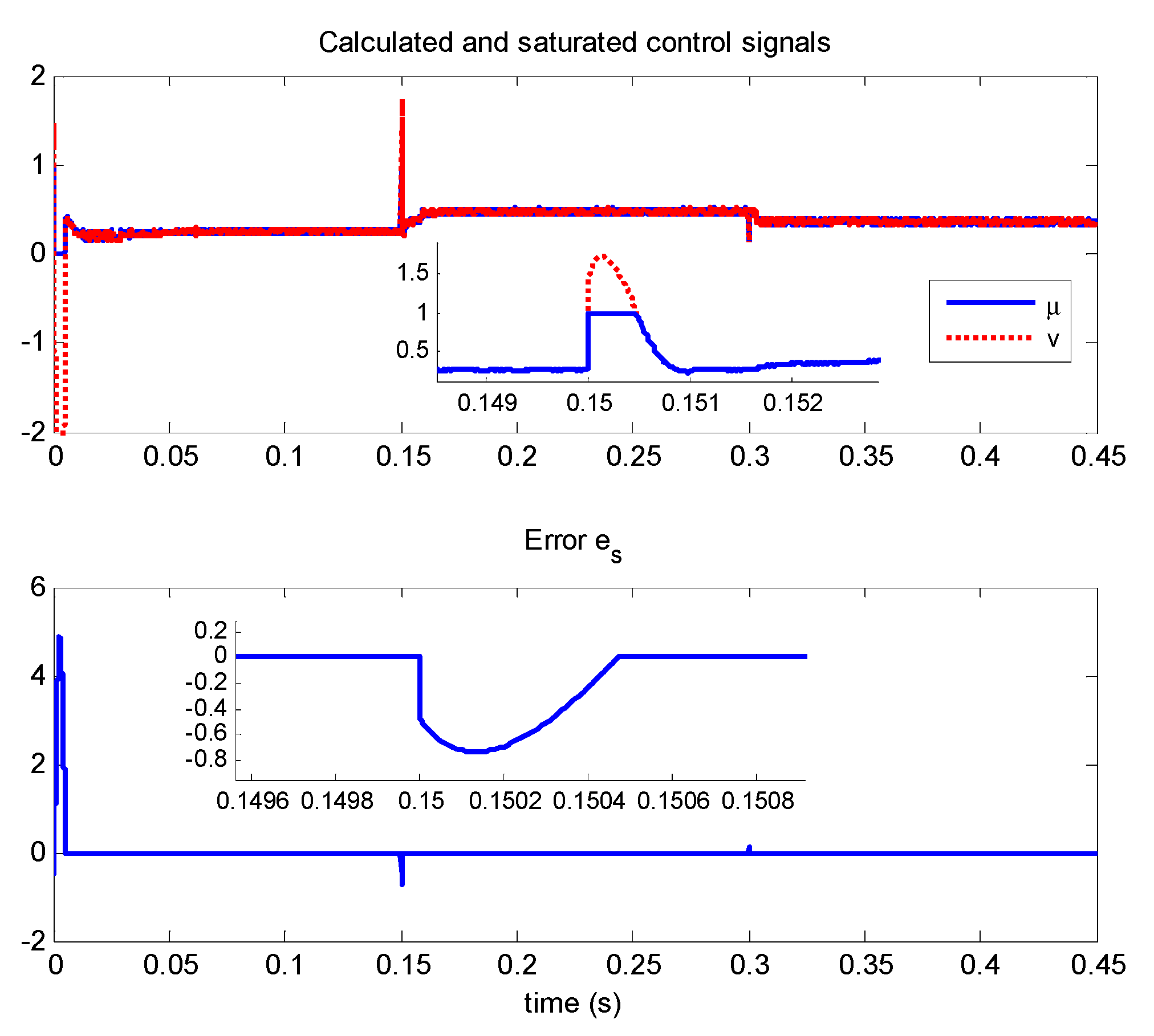
4.2.1. Controller Behavior in the Presence of Output Reference Variations
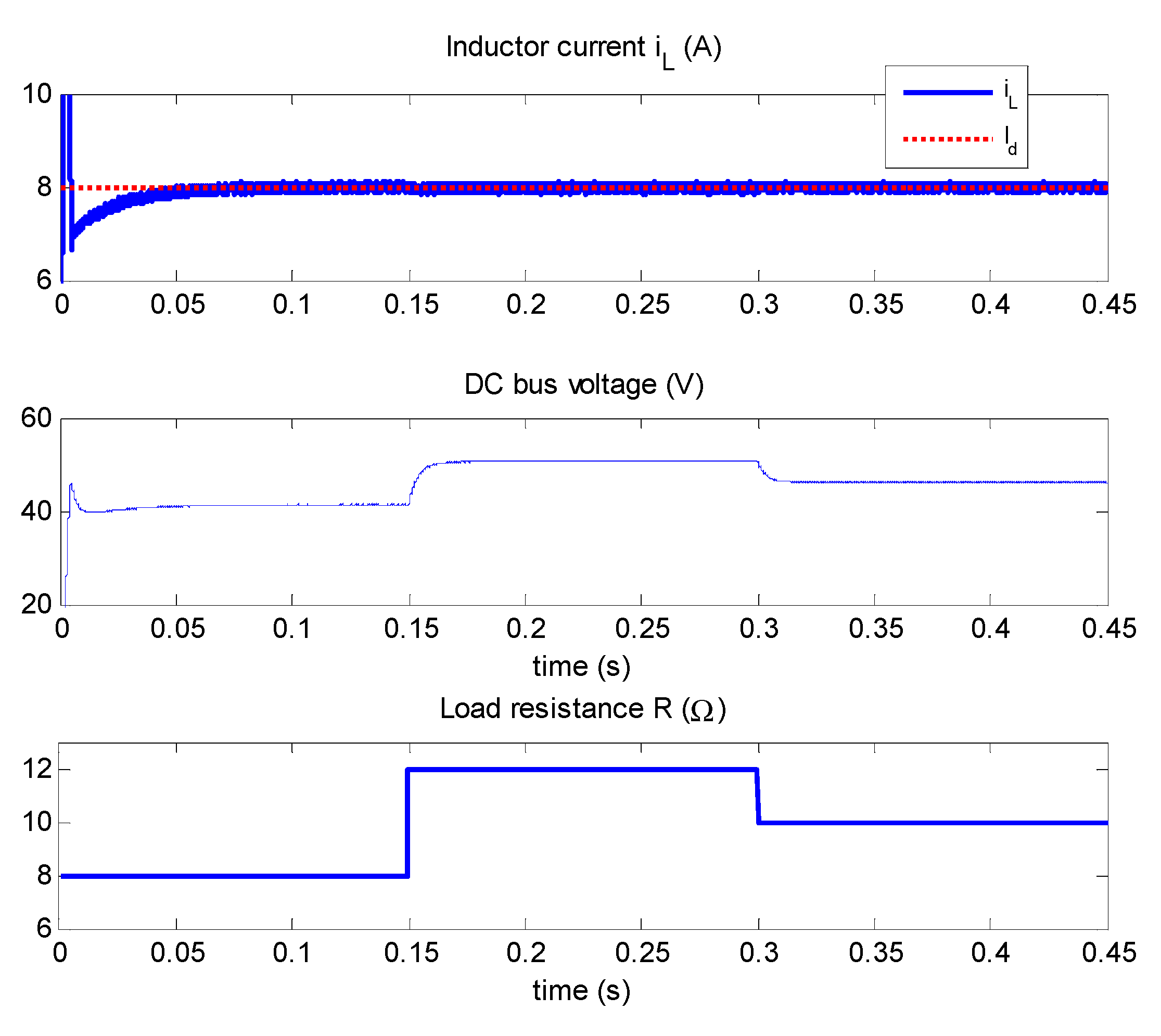
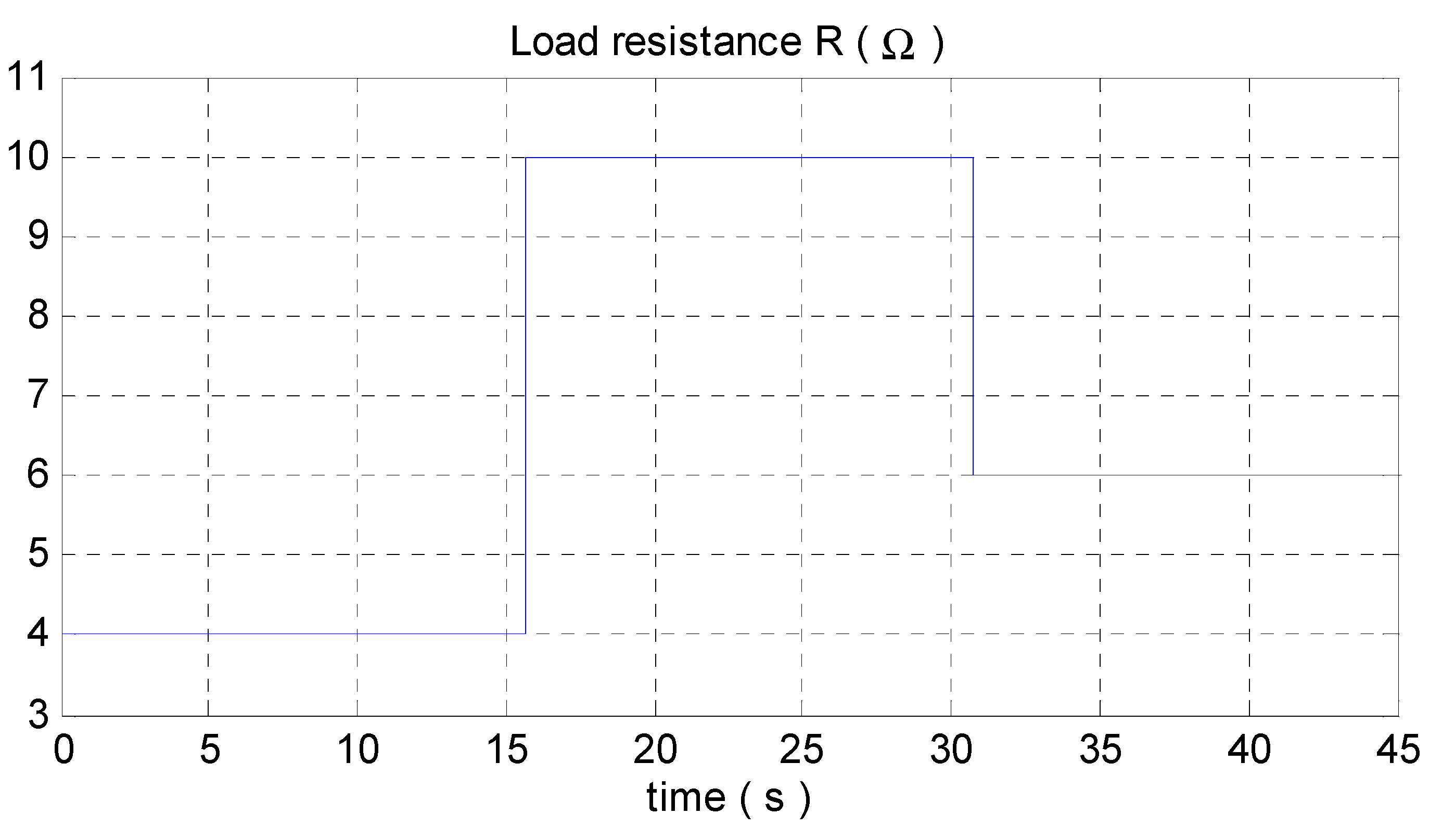
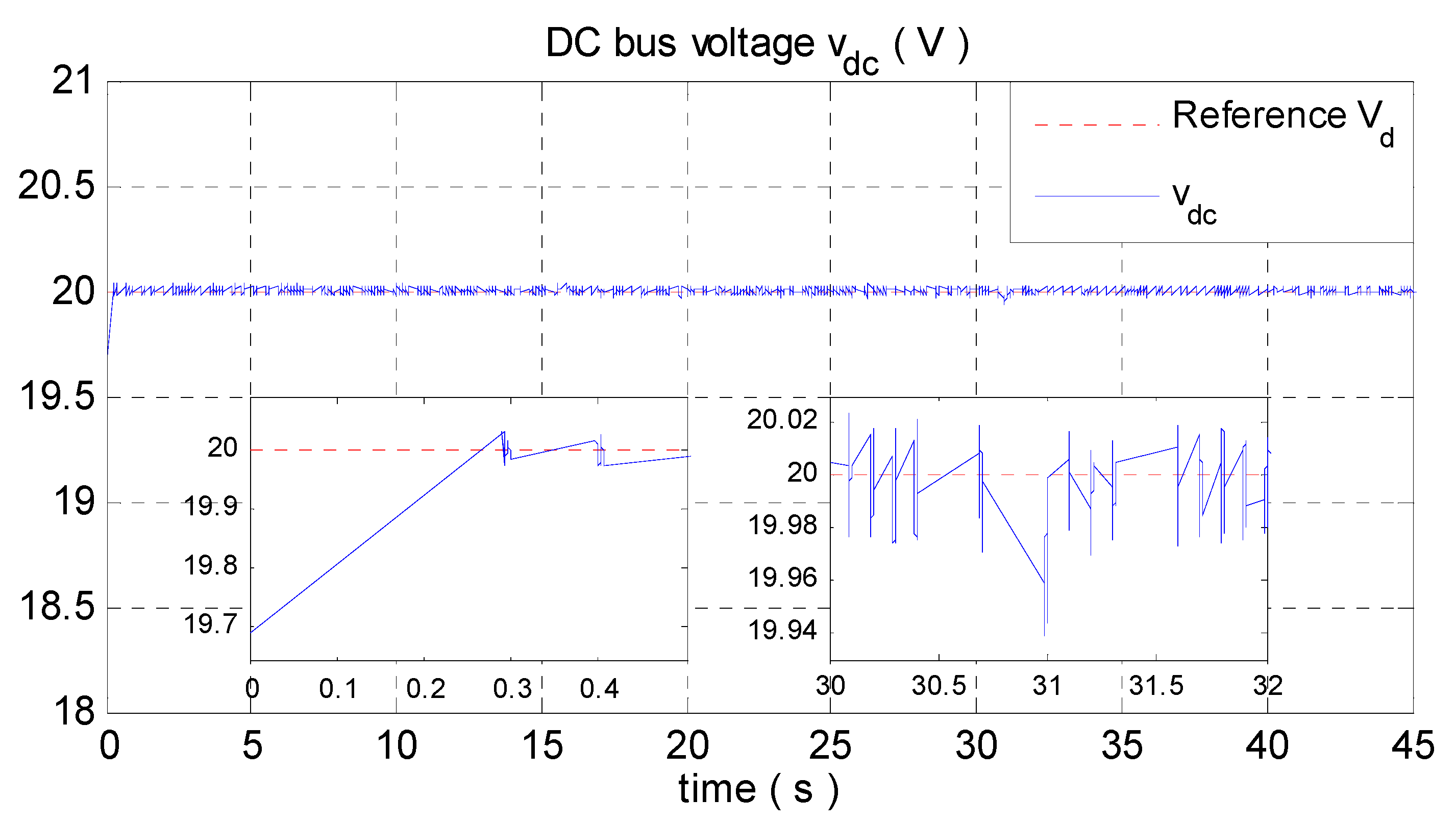
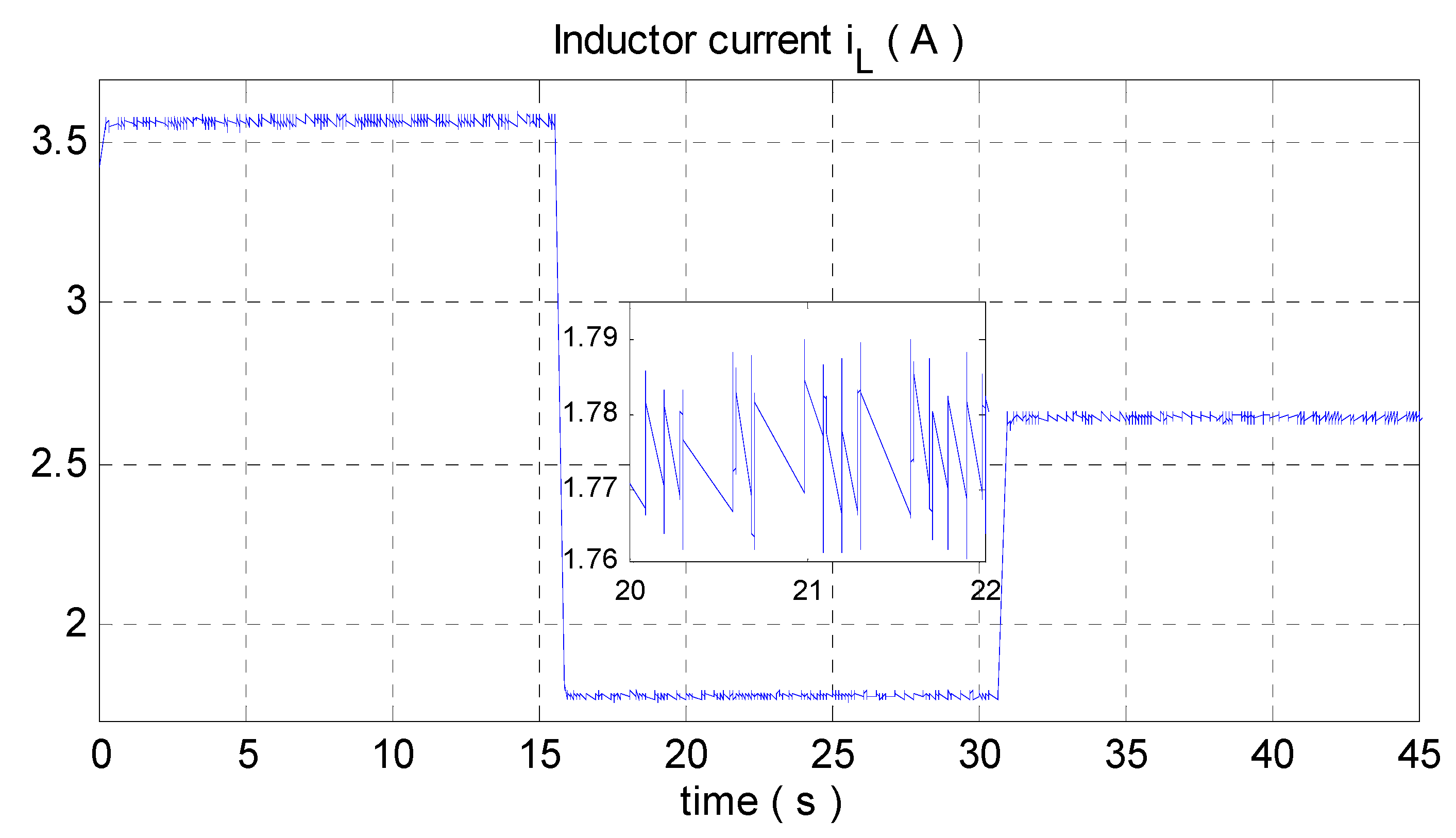
4.2.2. Controller Sensitivity to the Perturbation Caused by Load Uncertainty
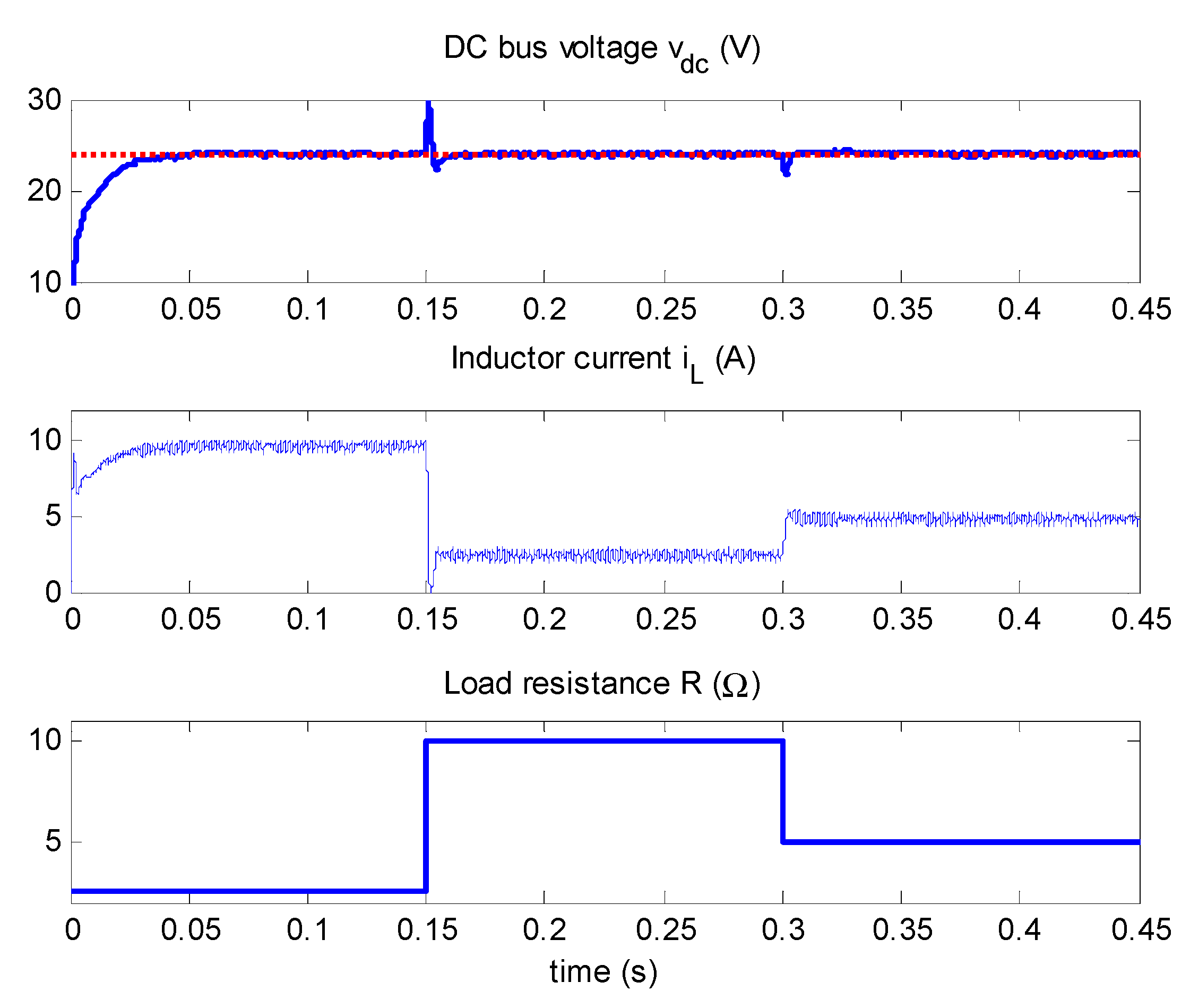
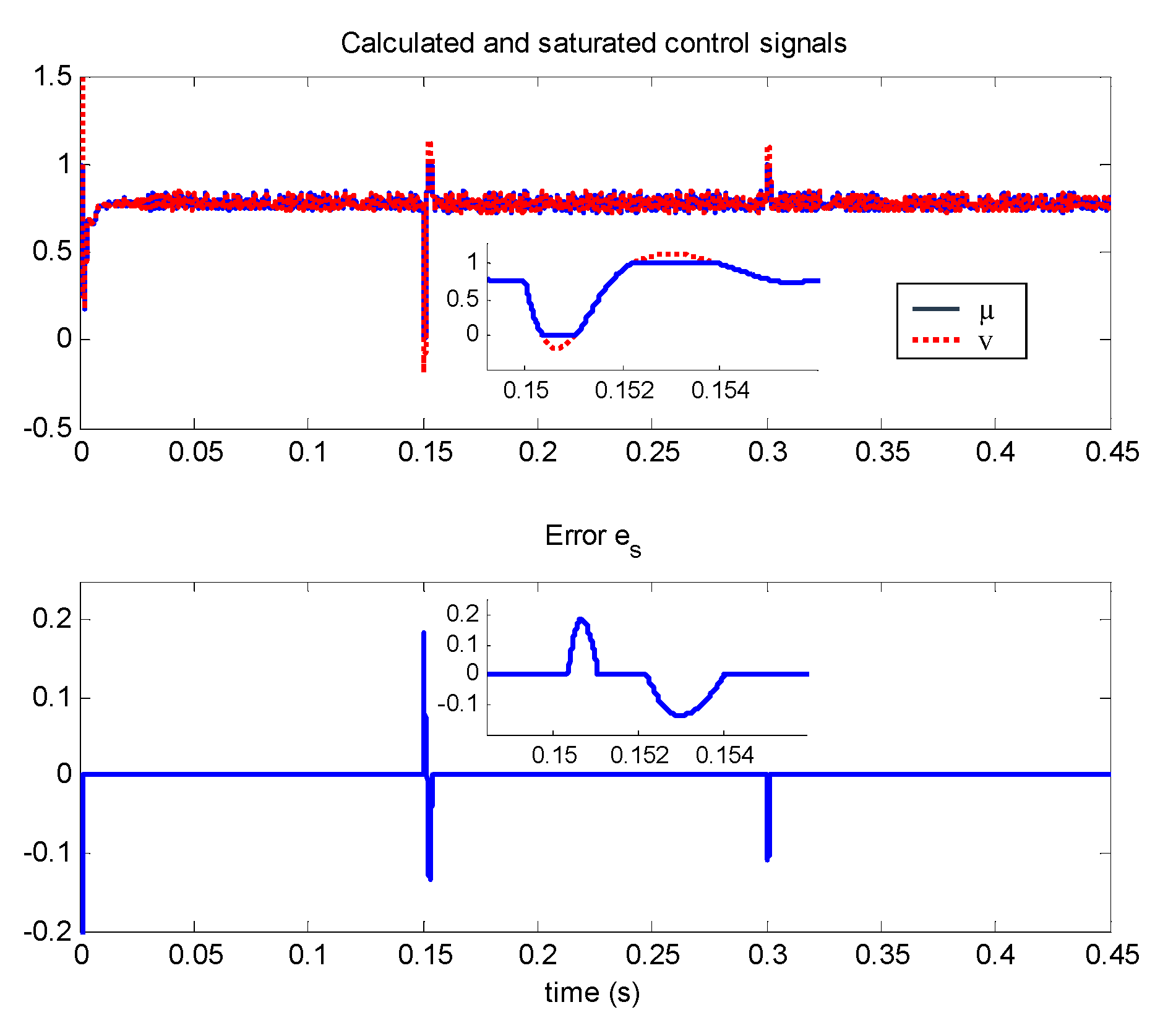
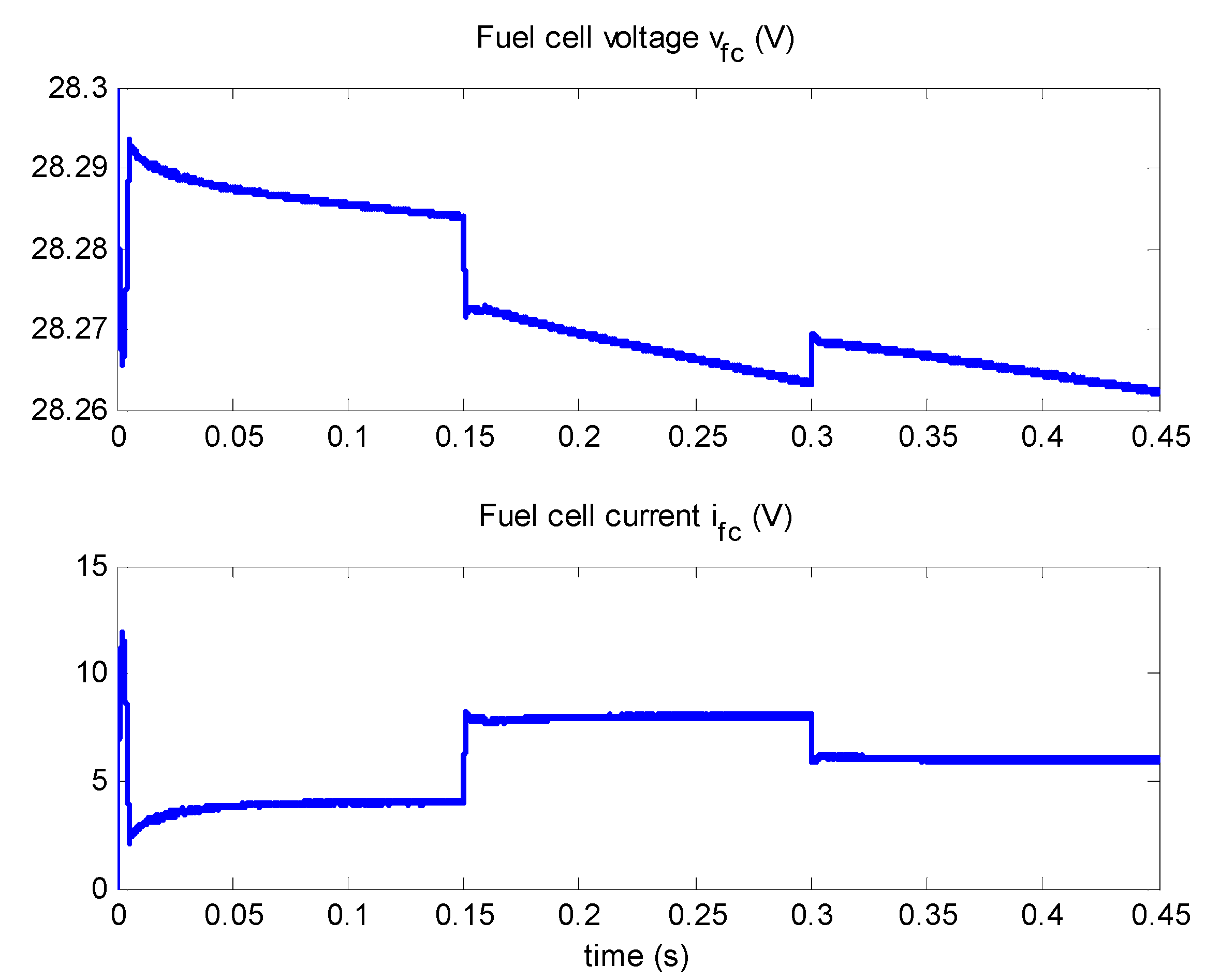
4.3. Simulation of the FC-Boost Association
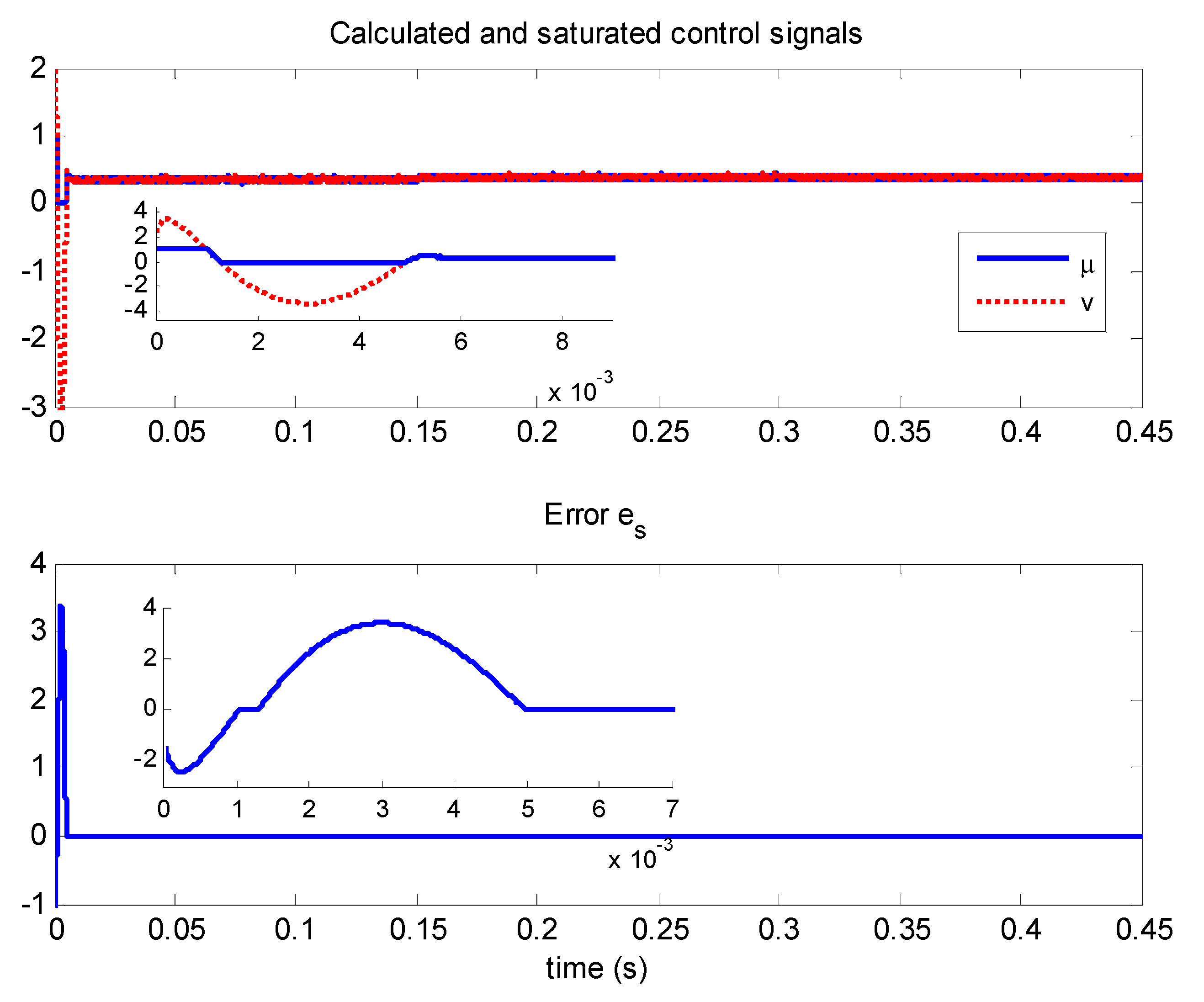
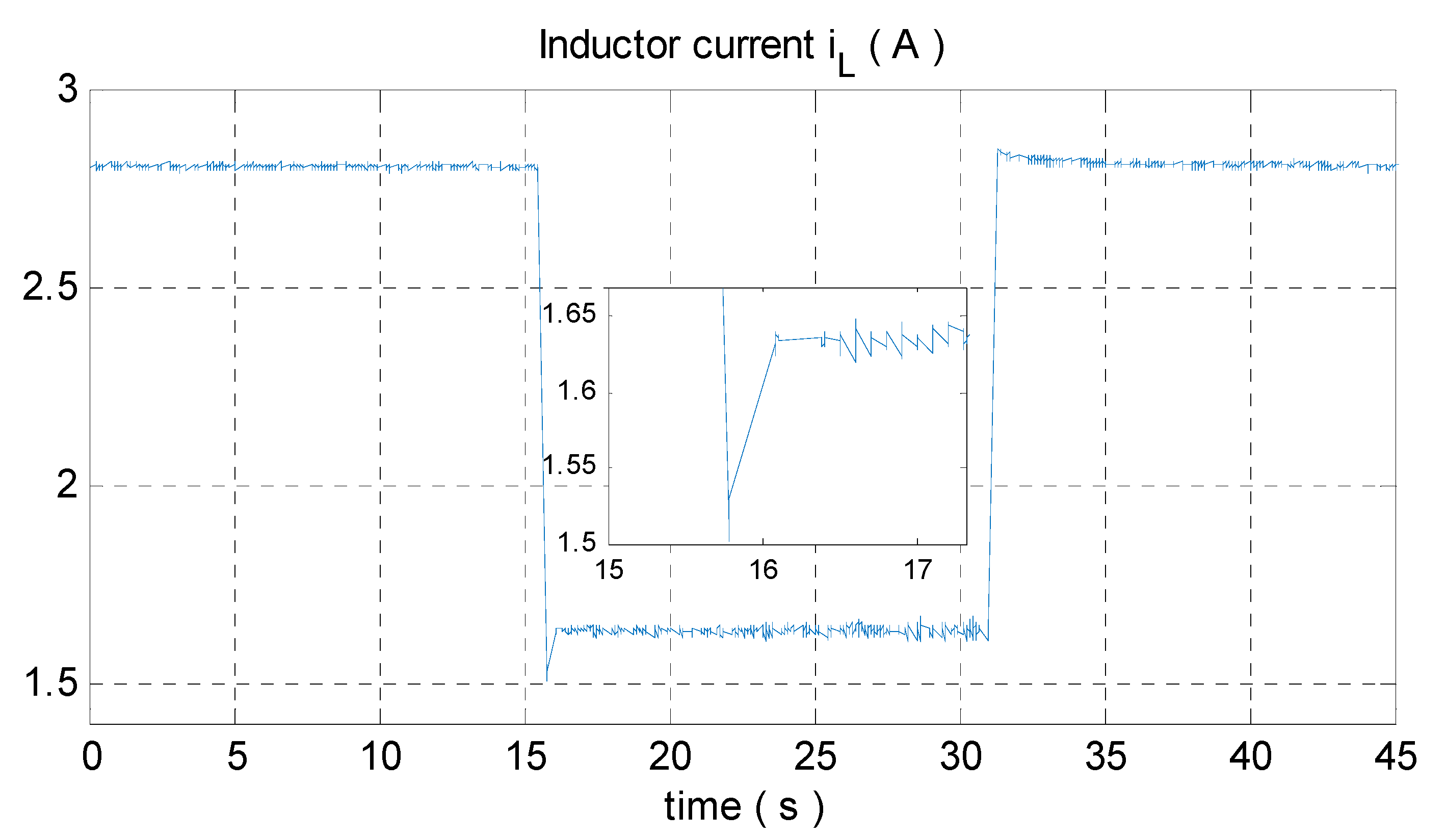
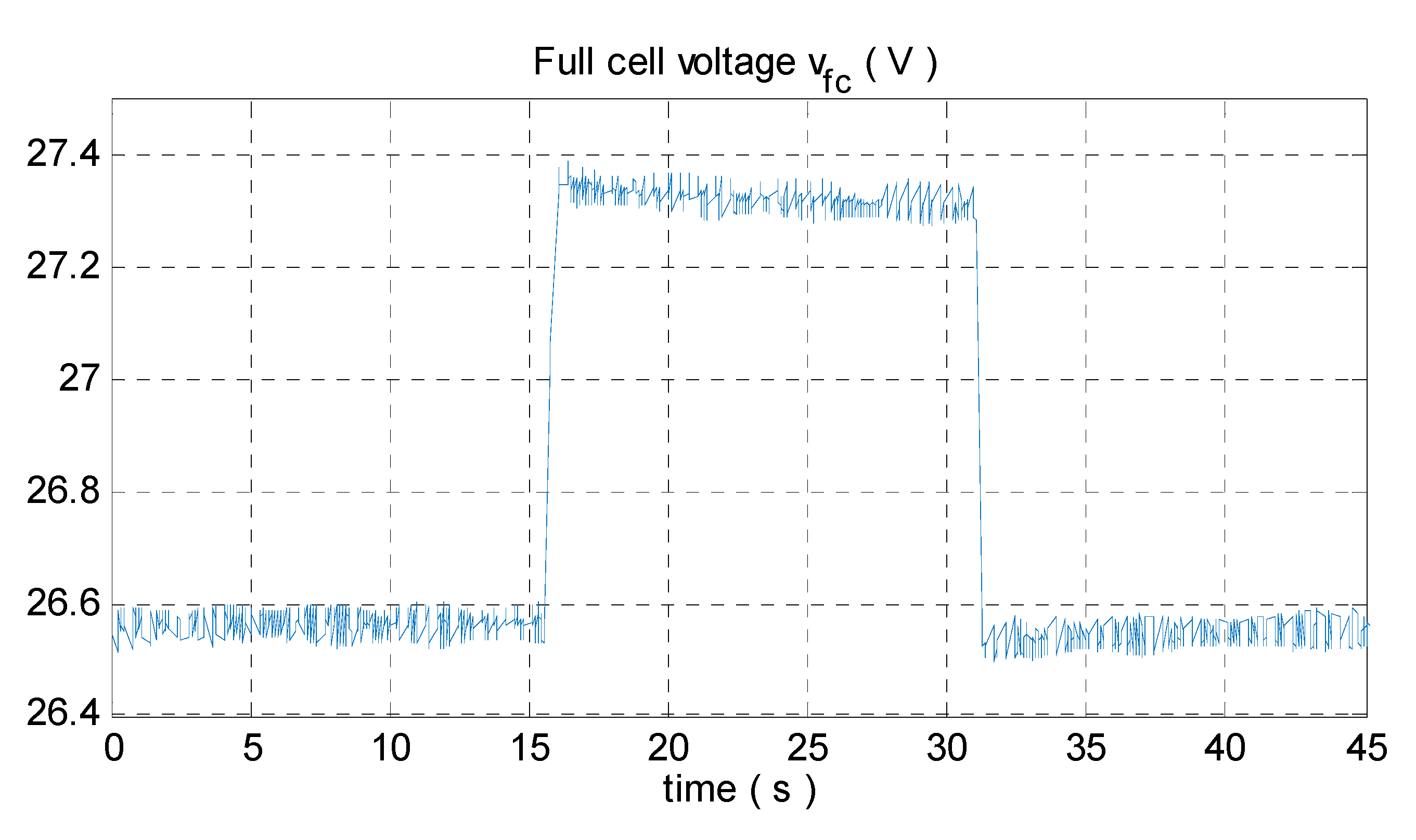
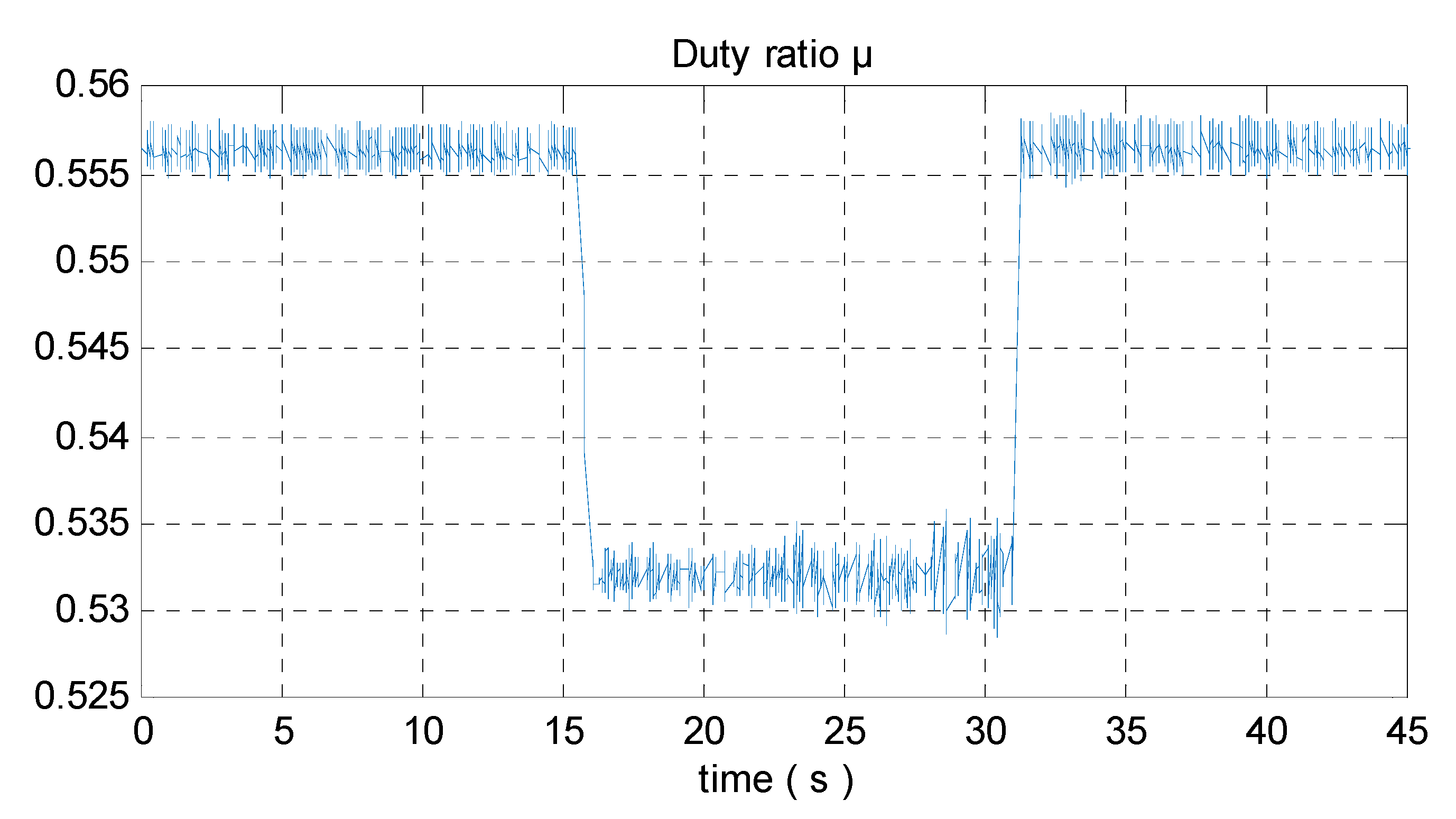
4.3.1. Validation of the Performances of the Current Loop (Inner Loop)
- (A)
- Controller behavior in the presence of output reference variations:
- (B)
- Controller sensitivity to the perturbation caused by load uncertainty.
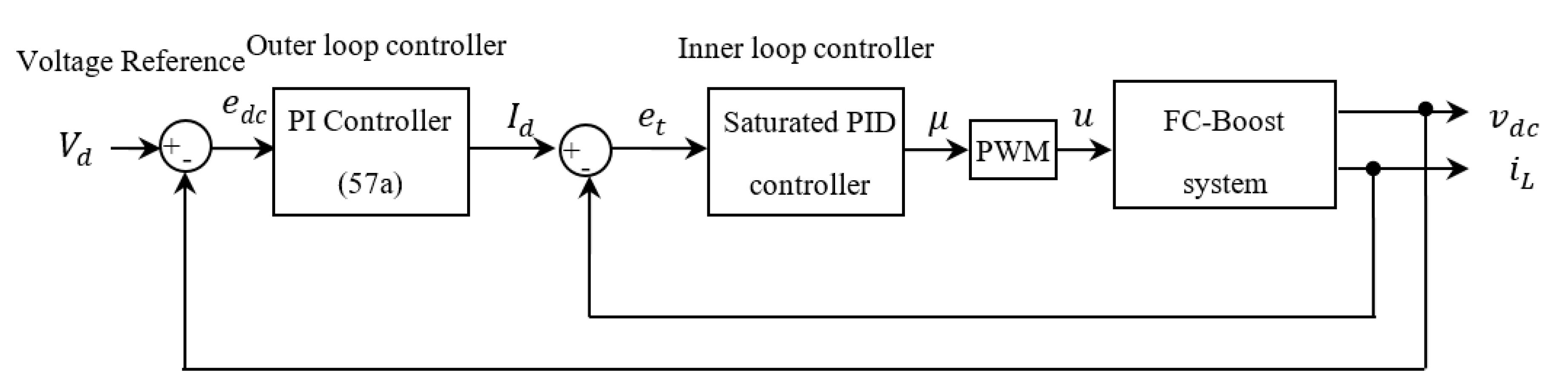
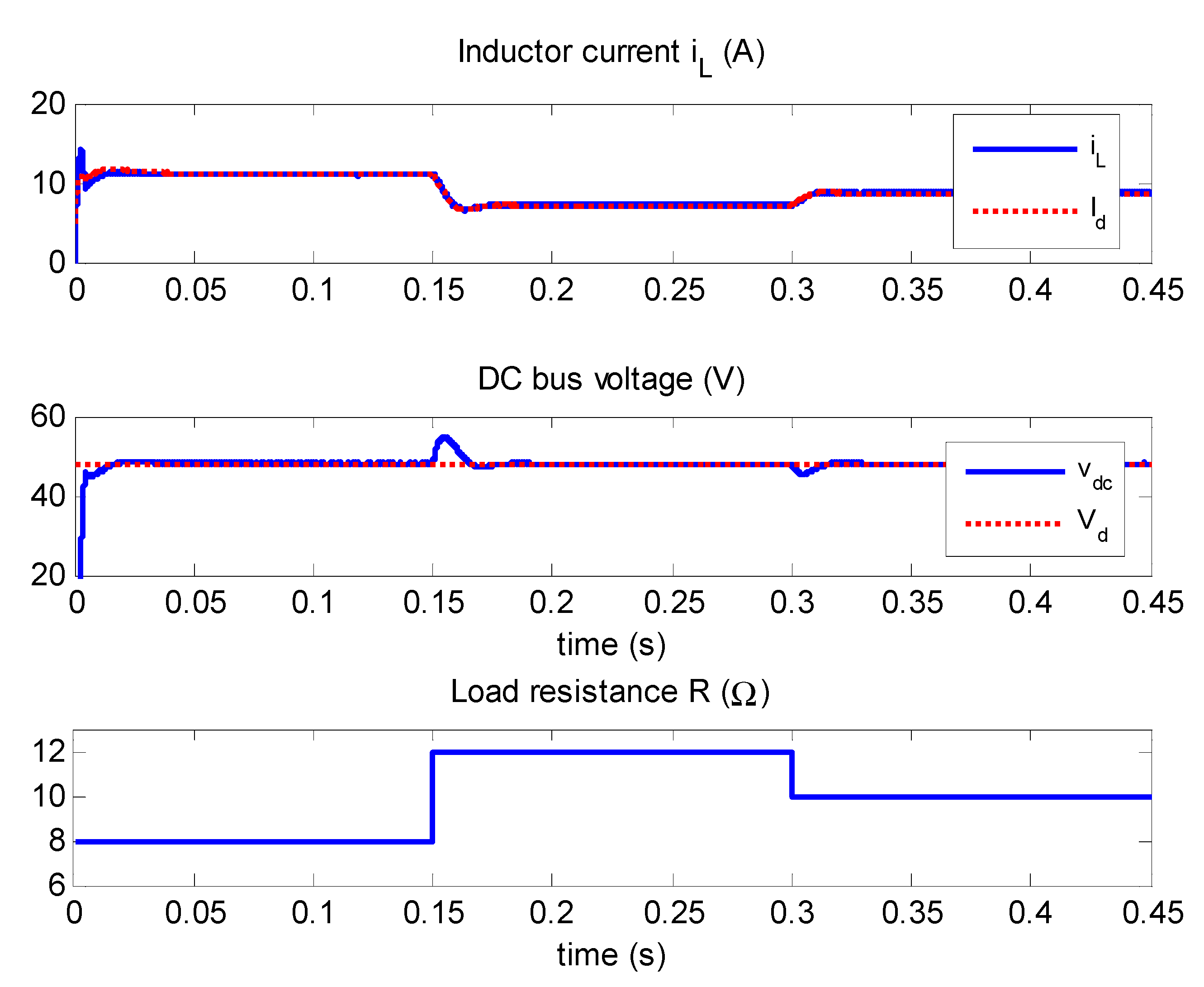
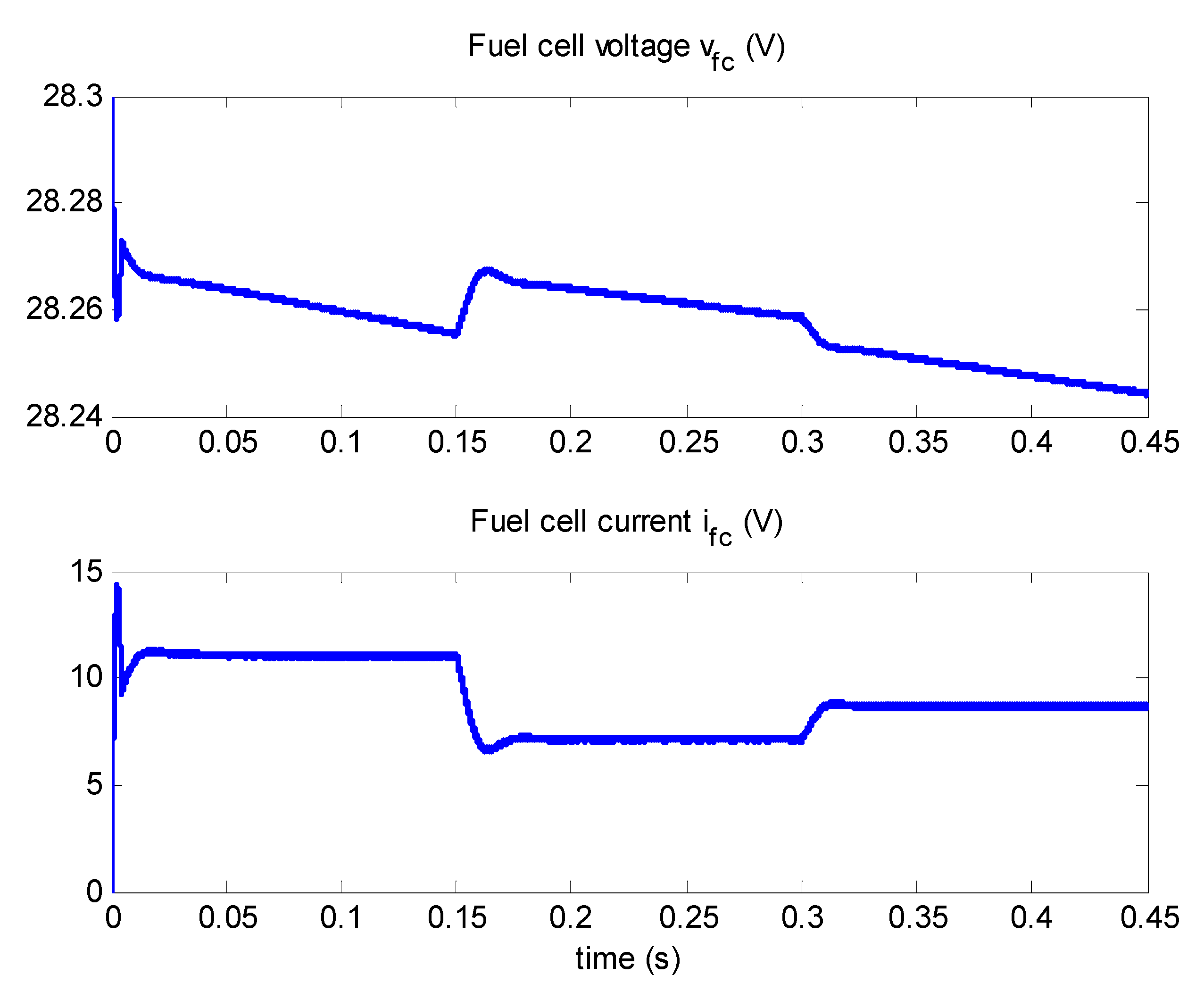
4.3.2. Validation of the Performances of the Voltage Loop (Outer Loop)
5. Experimental Results
5.1. Validation of the FC-Buck Association
5.2. Validation of the FC-Boost Association
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zubi, G.; Dufo-López, R.; Carvalho, M.; Pasaoglu, G. The lithium-ion battery: State of the art and future perspectives. Renew. Sustain. Energy Rev. 2018, 89, 292–308. [Google Scholar] [CrossRef]
- Kwan, T.H.; Katsushi, F.; Shen, Y.; Yin, S.; Zhang, Y.; Kase, K.; Yao, Q. Comprehensive review of integrating fuel cells to other energy systems for enhanced performance and enabling poly generation. Renew. Sustain. Energy Rev. 2020, 128, 109897. [Google Scholar] [CrossRef]
- Khaligh, A.; Li, Z. Battery, Ultracapacitor, Fuel Cell, and Hybrid Energy Storage Systems for Electric, Hybrid Electric, Fuel Cell, and Plug-In Hybrid Electric Vehicles. State Art. IEEE Trans. Veh. Technol. 2010, 59, 2806–2814. [Google Scholar] [CrossRef]
- Ferriz, A.; Bernad, A.; Mori, M.; Fiorot, S. End-of-life of fuel cell and hydrogen products: A state of the art. Int. J. Hydrog. Energy 2019, 44, 12872–12879. [Google Scholar] [CrossRef]
- Moradisizkoohi, H.; Elsayad, N.; Mohammed, O.A. Experimental Verification of a Double-Input Soft-Switched DC–DC Converter for Fuel Cell Electric Vehicle with Hybrid Energy Storage System. IEEE Trans. Ind. Appl. 2019, 55, 6451–6465. [Google Scholar] [CrossRef]
- Fathabadi, H. Combining a proton exchange membrane fuel cell (PEMFC) stack with a Li-ion battery to supply the power needs of a hybrid electric vehicle. Renew. Energy 2019, 130, 714–724. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, H.; Li, J.; Sumner, M.; Xia, C. DC–DC Boost Converter With a Wide Input Range and High Voltage Gain for Fuel Cell Vehicles. IEEE Trans. Power Electron. 2019, 34, 4100–4111. [Google Scholar] [CrossRef]
- Kolli, A.; Gaillard, A.; De Bernardinis, A.; Bethoux, O.; Hissel, D.; Khatir, Z. A review on DC/DC converter architectures for power fuel cell applications. Energy Convers. Manag. 2015, 105, 716–730. [Google Scholar] [CrossRef]
- Kabalo, M.; Blunier, B.; Bouquain, D.; Miraoui, A. State-of-the-art of DC-DC converters for fuel cell vehicles. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Ahmed, O.; Bleijs, J. An overview of DC–DC converter topologies for fuel cell-ultracapacitor hybrid distribution system. Renew. Sustain. Energy Rev. 2015, 42, 609–626. [Google Scholar] [CrossRef]
- Daud, W.R.W.; Rosli, R.E.; Majlan, E.H.; Hamid, S.A.A.; Mohamed, R.; Husaini, T. PEM fuel cell system control: A review. Renew. Energy 2017, 113, 620–638. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, C.; Li, S.; Yang, J.; Li, Q. Finite-Time Output Feedback Control for PWM-Based DC-DC Buck Power Converters of Current Sensorless Mode. IEEE Trans. Control Syst. Technol. 2016, 25, 1359–1371. [Google Scholar] [CrossRef]
- Ma, R.; Xu, L.; Xie, R.; Zhao, D.; Huangfu, Y.; Gao, F. Advanced Robustness Control of DC–DC Converter for Proton Exchange Membrane Fuel Cell Applications. IEEE Trans. Ind. Appl. 2019, 55, 6389–6400. [Google Scholar] [CrossRef]
- Zuniga-Ventura, Y.A.; Langarica-Cordoba, D.; Leyva-Ramos, J.; Diaz-Saldierna, L.H.; Ramirez-Rivera, V.M. Adaptive Backstepping Control for a Fuel Cell/Boost Converter System. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 686–695. [Google Scholar] [CrossRef]
- Huangfu, Y.; Li, Q.; Xu, L.; Ma, R.; Gao, F. Extended State Observer Based Flatness Control for Fuel Cell Output Series Interleaved Boost Converter. IEEE Trans. Ind. Appl. 2019, 55, 6427–6437. [Google Scholar] [CrossRef]
- Tahri, A.; El Fadil, H.; Rachid, A.; Eric, M.; Giri, F. A Nonlinear Controller Based on a High Gain Observer for a Cascade Boost Converter in a Fuel Cell Distributed Power Supply System. IFAC-PapersOnLine 2019, 52, 91–96. [Google Scholar] [CrossRef]
- Thounthong, P.; Pierfederici, S. A New Control Law Based on the Differential Flatness Principle for Multiphase Interleaved DC–DC Converter. IEEE Trans. Circuits Syst. II Express Briefs 2010, 57, 903–907. [Google Scholar] [CrossRef]
- Zumoffen, D.; Basualdo, M. Advanced control for fuel cells connected to a DC/DC converter and an electric motor. Comput. Chem. Eng. 2010, 34, 643–655. [Google Scholar] [CrossRef]
- Somkun, S.; Sirisamphanwong, C.; Sukchai, S. A DSP-based interleaved boost DC–DC converter for fuel cell applications. Int. J. Hydrog. Energy 2015, 40, 6391–6404. [Google Scholar] [CrossRef]
- Zhang, Y.; Fu, C.; Sumner, M.; Wang, P. A Wide Input-Voltage Range Quasi-Z-Source Boost DC–DC Converter with High-Voltage Gain for Fuel Cell Vehicles. IEEE Trans. Ind. Electron 2018, 65, 5201–5212. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Sun, J.; Zhang, L. Anti-windup controller design for singularly perturbed systems subject to actuator saturation. IET Control Theory Appl. 2016, 10, 469–476. [Google Scholar] [CrossRef]
- El Fadil, H.; Giri, F.; Chaoui, F.; El Magueri, O. Accounting for Input Limitation in the Control of Buck Power Converters. IEEE Trans. Circuits Syst. I Regul. Pap. 2009, 56, 1260–1271. [Google Scholar] [CrossRef]
- Xiao, W.; Wen, H.; Zeineldin, H. Affine parameterization and anti-windup approaches for controlling DC-DC converters. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 154–159. [Google Scholar]
- Tarakanath, K.; Patwardhan, S.C.; Agarwal, V. Implementation of an internal model controller with anti-reset windup compensation for output voltage tracking of a non-minimum phase dc-dc boost converter using FPGA. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar]
- Moreno-Valenzuela, J. A Class of Proportional-Integral With Anti-Windup Controllers for DC–DC Buck Power Converters With Saturating Input. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 157–161. [Google Scholar] [CrossRef]
- KazimierczukMarian, K. Pulse-Width Modulated DC-DC Power Converters, 2nd ed.; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Larminie, J. Fuel Cell Systems Explained, 2nd ed.; Wiley: Hoboken, NJ, USA, 2003. [Google Scholar]
- Wang, C.; Nehrir, M.; Shaw, S.R. Dynamic models and model validation for PEM fuel cells using electrical circuits. IEEE Trans. Energy Convers. 2005, 20, 442–451. [Google Scholar] [CrossRef]
- Krein, P.; Bentsman, J.; Bass, R.; Lesieutre, B. On the use of averaging for the analysis of power electronic systems. IEEE Trans. Power Electron. 1990, 5, 182–190. [Google Scholar] [CrossRef]
- El Fadil, H.; Giri, F. Backstepping Based Control of PWM DC-DC Boost Power Converters. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 395–400. [Google Scholar]
- Glattfelder, A.H.; Schaufelberger, W. Control Systems with Input and Output Constraints; Springer: Berlin, Germany, 2003. [Google Scholar]
- Anderson, B.D.O.; Moore, J.B. Optim. Control: Linear Quadratic Methods; Dover Publications: New York, NY, USA, 2007. [Google Scholar]
- Ghani, D.; Giri, F.; Chater, E.; Chaoui, F.Z.; Haloua, M. Control of Discrete-Time Systems Composed of Linear Blocks in Series with Saturation Components. Asian J. Control 2003, 17, 1935–1945. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear Systems Analysis; Prentice Hall, Inc.: Upper Saddle River, NJ, USA, 2003. [Google Scholar]
- Valdez-Resendiz, J.E.; Sanchez, V.M.; Rosas-Caro, J.C.; Mayo-Maldonado, J.C.; Sierra, J.; Barbosa, R. Continuous input-current buck-boost DC-DC converter for PEM fuel cell applications. Int. J. Hydrog. Energy 2017, 42, 30389–30399. [Google Scholar] [CrossRef]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Buck Converter | Boost Converter |
|---|---|---|
| 0 | ||
| Parameter Designation | Value | |
|---|---|---|
| Fuel Cell | FC open circuit voltage | |
| FC internal capacitor | ||
| Association of the activation and concentration resistances | ||
| Ohmic resistance | ||
| DC-DC Converter | Filtering inductance | |
| Filtering capacitor | ||
| ESR of the inductance | ||
| load nominal value | ||
| PWM switching frequency |
| Transfer Function | |
| Controller | |
| Transfer Function | |
| Controller | |
| Parameter | Buck Converter | Boost Converter |
|---|---|---|
| kd | 10−4 | |
| wd | 1830.3 rad/s | 5649.8634 rad/s |
| ki | 0.9 | 11 |
| kp | 10−3 | 0.09 |
| ks | 0.049 | 2.03 |
| kpv | - | 0.09 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belhaj, F.Z.; El Fadil, H.; Idrissi, Z.E.; Koundi, M.; Gaouzi, K. Modeling, Analysis and Experimental Validation of the Fuel Cell Association with DC-DC Power Converters with Robust and Anti-Windup PID Controller Design. Electronics 2020, 9, 1889. https://doi.org/10.3390/electronics9111889
Belhaj FZ, El Fadil H, Idrissi ZE, Koundi M, Gaouzi K. Modeling, Analysis and Experimental Validation of the Fuel Cell Association with DC-DC Power Converters with Robust and Anti-Windup PID Controller Design. Electronics. 2020; 9(11):1889. https://doi.org/10.3390/electronics9111889
Chicago/Turabian StyleBelhaj, Fatima Zahra, Hassan El Fadil, Zakariae El Idrissi, Mohamed Koundi, and Khawla Gaouzi. 2020. "Modeling, Analysis and Experimental Validation of the Fuel Cell Association with DC-DC Power Converters with Robust and Anti-Windup PID Controller Design" Electronics 9, no. 11: 1889. https://doi.org/10.3390/electronics9111889