
Abstract
At high Peclet number, the residence time exhibits a boundary layer adjacent to incoming open boundaries. In a Eulerian model, not resolving this boundary layer can generate spurious oscillations that can propagate into the area of interest. However, resolving this boundary layer would require an unacceptably high spatial resolution. Therefore, alternative methods are needed in which no grid refinement is required to capture the key aspects of the physics of the residence time boundary layer. An extended finite element method representation and a boundary layer parameterisation are presented and tested herein. It is also explained how to preserve local consistency in reversed time simulations so as to avoid the generation of spurious residence time extrema. Finally, the boundary layer parameterisation is applied to the computation of the residence time in the Scheldt Estuary (Belgium/The Netherlands). This timescale is simulated by means of a depth-integrated, finite element, unstructured mesh model, with a high space–time resolution. It is seen that the residence time temporal variations are mainly affected by the semi-diurnal tides. However, the spring–neap variability also impacts the residence time, particularly in the sandbank and shallow areas. Seasonal variability is also observed, which is induced by the fluctuations over the year of the upstream flows. In general, the residence time is an increasing function of the distance to the mouth of the estuary. However, smaller-scale fluctuations are also present: they are caused by local bathymetric features and their impact on the hydrodynamics.










Similar content being viewed by others

References
Alexe M, Sandu A (2009) Forward and adjoint sensitivity analysis with continuous explicit Runge–Kutta schemes. Appl Math Comput 208(2):328–346
Allen CM (1982) Numerical simulation of contaminant dispersion in estuary flows. In: Royal society of London proceedings series A, vol 381, pp 179–194
Arega F, Armstrong S, Badr A (2008) Modeling of residence time in the East Scott Creek Estuary, South Carolina, USA. Journal of Hydro-environment Research 2(2):99–108
Arminjon P, Dervieux A (1993) Construction of TVD-like artificial viscosities on two-dimensional arbitrary FEM grids. J Comput Phys 106(1):176–198
Black KP, Gay SL (1987) Eddy formation in unsteady flows. J Geophys Res 92(C9):9514–9522
Blumberg AF, Mellor GL (1987) A description of three-dimensional coastal ocean circulation model. In: Heaps NS (ed) Three dimensional coastal ocean model. American Geophysical Union, Washington, DC, pp 1–16
Bolin B, Rhode H (1973) A note on the concepts of age distribution and residence time in natural reservoirs. Tellus 25:58–62
Burchard H (2002) Applied turbulence modelling in marine waters. Lecture notes in earth science, vol 100. Springer, Heidelberg
Cockburn B, Shu C-W (1998) The Runge–Kutta discontinuous Galerkin method for conservation laws V-multidimensional systems. J Comput Phys 141:191–224
Combescure A, Gravouil A, Baietto-Dubourg M-C, Elguedj E, Ribeaucourt R, Ferri E (2005) Extended finite element method for numerical simulation of 3d fatigue crack growth. In: Dowson D, Priest M, Dalmaz G, Lubrecht AA (eds) Life cycle tribology—proceedings of the 31st Leeds-Lyon symposium on tribology held at Trinity and All Saints College, Horsforth, Leeds, UK 7th–10th September 2004. Tribology and interface engineering series, vol 48. Elsevier, Amsterdam, pp 323–328
Comblen R, Lambrechts J, Remacle J-F, Legat V (2009) Practical evaluation of five part-discontinuous finite element pairs for the non-conservative shallow water equations. Int J Numer Methods Fluids. doi:10.1002/fld.2094
de Brye B, de Brauwere A, Gourgue O, Kärna T, Lambrechts J, Comblen R, Deleersnijder E (2009) A finite-element, multi-scale model of the Scheldt Tributaries, River, Estuary and ROFI. Coast Eng (under revision)
Deleersnijder E (1993) Numerical mass conservation in a free-surface sigma coordinate marine model with mode splitting. J Mar Syst 4:365–370
Deleersnijder E, Campin J-M, Delhez EJM (2001) The concept of age in marine modelling: I. Theory and preliminary model results. J Mar Syst 28(3–4):229–267
Deleersnijder E, Delhez EJ (eds) (2007) Timescale- and tracer-based methods for understanding the results of complex marine models. Estuar Coast Shelf Sci 74:585–776 (special issue)
Delhez EJM (2006) Transient residence and exposure times. Ocean Sci 2(1):1–9
Delhez EJM, Deleersnijder E (2006) The boundary layer of the residence time. Ocean Dyn 56:139–150
Delhez EJ, Lacroix G, Deleersnijder E (2004a) The age as a diagnostic of the dynamics of marine ecosystem models. Ocean Dyn 54(2):221–231
Delhez EJM, Heemink AW, Deleersnijder E (2004b) Residence time in a semi-enclosed domain from the solution of an adjoint problem. Estuar Coast Shelf Sci 61:691–702
Egbert GD, Benett AF, Foreman MGG (1994) TOPEX/ POSEIDON tides estimated using a global inverse model. J Geophys Res 99:24,821–24,852
Elden L (1982) Time discretization in the backward solution of parabolic equations. II. Math Comput 39(159):69–84
Garabedian PR (1964) Partial differential equations. Wiley, New York
Gourgue O, Deleersnijder E, White L (2007) Toward a generic method for studying water renewal, with application to the epilimnion of Lake Tanganyika. Estuar Coast Shelf Sci 74:764–776
Hanert E, Deleersnijder E, Blaise S, Remacle J-F (2007) Capturing the bottom boundary layer in finite element ocean models. Ocean Model 17:153–162
Kalnay E, Kanamitsu M, Kistler R, Collins W, Deaven D, Gandin L, Iredell M, Saha S, White G, Woollen J, Zhu Y, Leetmaa A, Reynolds B, Chelliah M, Ebisuzaki W, Higgins W, Janowiak J, Mo KC, Ropelewski C, Wang J, Jenne R, Joseph D (1996) The NCEP/NCAR 40-year reanalysis project. Bull Am Meteorol Soc 77:437–472
Kuzmin D, Löhner R, Turek S (eds) (2005) Flux-corrected transport. Principles, algorithms and applications. Springer, Heidelberg
Liu C-S, Chang C-W, Chang J-R (2008a) The backward group preserving scheme for 1d backward in time advection–dispersion equation. Numer Methods Partial Differ Equ 26(1):61–80
Liu W-C, Chen W-B, Kuo J-T, Wu C (2008b) Numerical determination of residence time and age in a partially mixed estuary using three-dimensional hydrodynamic model. Cont Shelf Res 28(8):1068–1088
Luther KH, Haitjema HM (1998) Numerical experiments on the residence time distributions of heterogeneous groundwatersheds. J Hydrol 207(1–2):1–17
Meyers SD, Luther ME (2008) A numerical simulation of residual circulation in Tampa Bay. Part II: Lagrangian residence time. Estuar Coast 31:815–827
Moës N, Dolbow J, Belytschko T (1999) A finite element method for crack growth without remeshing. Int J Numer Methods Eng 46:131–150
Monsen NE, Cloern JE, Lucas LV, Monismith SG (2002) A comment on the use of flushing time, residence time, and age as transport time scales. Limnol Oceanogr 47:1545–1553
Nauman EB (1981) Residence time distributions in systems governed by the dispersion equation. Chem Eng Sci 36(6):957–966
Pawlowicz R, Beardsley B, Lentz S (2002) Classical tidal harmonic analysis including error estimates in MATLAB using T_TIDE. Comput Geosci 28:929–937
Payne LE (1975) Improperly posed problems in partial differential equations. In: Regional conference series in applied mathematics. Society for Industrial and Applied Mathematics
Soetaert K, Herman PMJ (1995) Estimating estuarine residence times in the Westerschelde (The Netherlands) using a box model with fixed dispersion coefficients. Hydrobiologia 311:215–224
Spivakovskaya D, Hemink AW, Deleersnijder E (2007) Lagrangian modelling of multi-dimensional advection–diffusion with space-varying diffusivities: theory and idealized test cases. Ocean Dyn 57:189–203
Steen RJ, Evers EH, Hattum BV, Cofino WP, Brinkman TUA (2002) Net fluxes of pesticides from the Scheldt Estuary into the North Sea: a model approach. Environ Pollut 116(1):75–84
Takeoka H (1984) Fundamental concepts of exchange and transport time scales in a coastal sea. Cont Shelf Res 3(3):311–326
Tartinville B, Deleersnijder E, Rancher J (1997) The water residence time in the Mururoa atoll lagoon: sensitivity analysis of a three-dimensional model. Coral Reefs 16:193–203
Thuburn J, Haine TWN (2001) Adjoints of nonoscillatory advection schemes. J Comput Phys 171:616–631
Wang C-F, Hsu M-H, Kuo AY (2004) Residence time of the Danshuei River estuary, Taiwan. Estuar Coast Shelf Sci 60(3):381–393
White L, Legat V, Deleersnijder E (2008) Tracer conservation for three-dimensional, finite-element, free-surface, ocean modeling on moving prismatic meshes. Mon Weather Rev 136:420–442
Wyart E, Duflot M, Coulon D, Martiny P, Pardoen T, Remacle J-F, Lani F (2008) Substructuring FE-XFE approaches applied to three-dimensional crack propagation. J Comput Appl Math 215(2):626–638
Zimmerman JTF (1976) Mixing and flushing of tidal embayments in the western dutch Wadden Sea. Part I: distribution of salinity and calculation of mixing time scales. Neth J Sea Res 10:149–191
Acknowledgements
Sébastien Blaise is a Research fellow with the Belgian Fund for Research in Industry and Agriculture (FRIA). Richard Comblen and Eric Deleersnijder are, respectively, a Research fellow and a Research associate with the Belgian National Fund for Scientific Research (FNRS). Eric Delhez is an honorary Research Associate with the Belgian National Fund for Scientific Research. Anouk de Brauwere is a postdoctoral researcher at the Research Foundation Flanders (FWO-Vlaanderen). The present study was carried out within the scope of the project “A second-generation model of the ocean system”, which is funded by the Communauté Francaise de Belgique, as Actions de Recherche Concertées, under contract ARC 04/09-316, and the project “Tracing and Integrated Modelling of Natural and Anthropogenic Effects on Hydrosystems” (TIMOTHY), an Interuniversity Attraction Pole (IAP6.13) funded by the Belgian Federal Science Policy Office (BELSPO). This work is a contribution to the development of SLIM, the Second-generation Louvain-la-Neuve Ice-ocean Model (http://www.climate.be/SLIM). The authors are indebted to Emmanuel Hanert and Olivier Gourgue for their useful comments.
Author information
Authors and Affiliations
Corresponding author
Additional information
Responsible Editor: Pierre Lermusiaux
Appendices
Appendix A: Derivation of the two-dimensional residence time equation
Equation 1 for the depth-averaged residence time can be derived by adapting the procedure introduced in Delhez et al. (2004b) in the context of a three-dimensional model.
In the context of two-dimensional depth-integrated model, the (mean) residence time in a control domain ω at a particular location \({\boldsymbol{x}}_0\) and a given time t 0 is given by
where \(C(t,{\boldsymbol{x}})\) denotes the concentration field produced by a unit point discharge at \({\boldsymbol{x}}_0\) at time t 0 and where H is the total water depth (which is the sum of the surface elevation and the reference water depth).
In a direct approach, C is obtained by solving the advection–diffusion problem
where \({\boldsymbol{u}}\) and κ denote, respectively, the depth-averaged horizontal velocity and the diffusivity and where δ is the Dirac impulse function. Using this approach, the direct problem 21 must be solved for a variety of initial conditions corresponding to the times and locations at which the residence time is sought, which can be very demanding in computer resources.
An alternative and more efficient procedure can be derived by considering the adjoint of Eq. 21. To this end, we define the adjoint variable \(C^\star_{T}\) as the solution of the differential problem
where T denotes some fixed time horizon.
Using Eqs. 21 and 22, it is easy to show that (see Delhez et al. 2004b)
so that the adjoint variable can be interpreted as the amount of the tracer considered in the direct problem that is still present in the control domain at time T, i.e. the fraction of the mass of the tracer released at time t 0 and location \({\boldsymbol{x}}_0\) with a residence time larger than T − t 0. One has therefore
where we introduced the cumulative distribution function
With this definition and using the depth-integrated continuity equation
it is easy to show from Eq. 22 that D satisfies the differential equation
and the auxiliary condition
Integrating Eq. 27 with respect to τ and assuming that \(D(t,\tau,{\boldsymbol{x}})\) decreases to zero when τ tends to infinity, i.e. that all the particles are eventually flushed out of the control domain, one finally gets
which is the differential equation for the (mean) depth-averaged residence time in ω.
Appendix B: Constraint on the mesh Peclet number
Starting from Eq. 6, we will solve the steady-state, one-dimensional problem defined in Section 3 by means of a finite difference scheme.
The domain is discretised by N finite difference nodes of indices n = 1→N, whose locations are defined by \(\tilde{x}_n=(n-1/2)/N\). The grid resolution is then defined by \(\Delta \tilde{x}=1/N\). The discrete residence time at these points is noted \(\tilde{\theta}_n^h\), where h refers to the approximate value of the variable. Two fictitious points are added beyond both boundaries of the domain (i.e. at \(\tilde{x}_0=-1/(2N)\) and \(\tilde{x}_{N+1}=1+1/(2N)\)) whose values will be noted \(\tilde{\theta}_0^h\) and \(\tilde{\theta}_{N+1}^h\). These points will be useful to enforce the Dirichlet boundary conditions, as no grid point is defined on the boundary. The simplest centered finite-difference discretisation of the non-dimensional form of Eq. 6 yields
Boundary conditions, which consist in a zero residence time at each boundary, are enforced by imposing
The solution of the discrete problem defined by Eqs. 30 and 31 is of the form
where
The constant r then satisfies
When the mesh Peclet number \(Pe^h=Pe\Delta\tilde{x}\) is higher than 2, the constant r is negative, and a spurious oscillating mode appears in the solution 32. In dimensional variables, the critical factor Pe h becomes Pe Δx/L. It can be written as Δx / (LPe − 1), i.e. the mesh size divided by the thickness of the boundary layer.
Appendix C: X-FEM method for the one-dimensional problem
Using the X-FEM method, the set of shape functions in Eq. 8 is enriched with shape functions derived from the exact solution:
where N x is the number of enriched nodes. F(x) is a function derived from the a priori known shape of the solution. It describes the solution up to a multiplicative factor that is to be determined. For the present one-dimensional experiment, this function is meant to represent the boundary layer. It is obtained by extracting from the exact solution 7 the part that is associated with the steep residence time gradient in the boundary layer, i.e.
The second term of Eq. 7 is linear and, hence, does not exhibit a boundary layer. It will then be handled by the classical linear shape functions. Thus, multiplying Eq. 39 by a nodal factor in combination with the linear shape functions contribution will allow for a good representation of the solution.
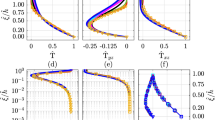
The residence time is computed in the idealised one-dimensional channel using X-FEM. The mesh is made up of ten elements (N = 11) with an enriched shape function for the first node of the mesh, corresponding to the inflow boundary (N x = 1). The X-FEM results (Fig. 2b) do not show the strong oscillations that appear when a classical finite element method is used (Fig. 1), and are very close to the analytical solution (Fig. 2a). However, oscillations still appear for moderate mesh Peclet numbers (e.g. when Pe h = 5,10,20). These oscillations appear only when the first node is enriched, and the boundary layer length exceeds the width of the enrichment zone. One might think that it is desirable to enrich more nodes. But, when doing so, problems arise, especially if extended shape functions are present where the solution is quasi-linear. In this case, the enriching function F(x) is almost equal to 1, and the linear system to be solved becomes ill-conditioned because ϕ j (x) and ϕ j (x) F(x) are almost equivalent. It is thus safe to enrich only the node that is adjacent to the boundary or to resort to a strategy consisting in determining a priori the number of nodes to enrich to obtain the most accurate solution whilst retaining a well-conditioned system. The second option is unlikely to be easy to implement. Furthermore, in many realistic applications, the width of the boundary layer is generally much smaller than the element size, implying that enriching only the first node will be sufficient in most cases.
Whilst the X-FEM method seems promising in an idealised problem, its application in a realistic model might present some difficulties:
-
As they depend on the velocity, the extended shape functions vary in time. They thus need to be updated after each temporal iteration. The solution at time t + Δt is expressed as a linear combination of the shape functions defined at time t. However, the test functions at time t + Δt must be used to compute the next time step. It is thus necessary to use two different sets of shape/test functions.
-
The shape functions are expressed as a function of the normal distance from the boundary. This distance can be complex to define in a realistic two-dimensional domain.
-
The enrichment is performed only near the boundary, which can be difficult to handle in a general finite elements code.
-
The steepness of the enriched shape functions requires a very high order integration rule. Whilst an exact integration can be performed in the one-dimensional model, it can be more complex in a two-dimensional framework. A possible solution would be to develop integration rules specifically designed for the function to integrate, but this is not straightforward.
Appendix D: Influence of the boundary condition on the oscillations
Starting from the non-dimensional finite-difference discretisation of the residence time Eq. 30, the parameterisation of the boundary layer 10 is now applied to the inflow boundary, whilst a Dirichlet boundary condition is still used at the outflow boundary:
The solution of the discrete problem is still of the form 32. However, due to the different boundary conditions, the coefficients modify to:
When the mesh Peclet number \(Pe\Delta \tilde{x}\) is higher than 2, the oscillating mode is still present. The amplitude of the oscillations is controlled by the constant A. Figure 10 shows that if we use a Dirichlet inflow boundary condition, the norm of this constant will increase with the mesh Peclet number. If the mesh Peclet number is high, the solution will inevitably show significant oscillations. If the parameterisation of the inflow boundary layer is used with a sufficiently large \(\frac{L^*}{L}\), the oscillatory part of the solution is limited and decreases as the mesh Peclet number increases (Fig. 10). This is due to the fact that, for a high mesh Peclet number, the boundary layer is entirely comprised in the parameterised zone. The parameterisation used with \(\frac{L^*}{L}=0\) produces the same results as the Dirichlet boundary condition. It is then necessary to use a sufficiently large value of \(\frac{L^*}{L}\) to limit the oscillating part of the solution.

Evolution of the constant A from Eq. 32 with the mesh Peclet number \(Pe\Delta \tilde{x}\) for the stationary one-dimensional problem. Results obtained using a Dirichlet boundary condition (plain line) and the parameterisation of the inflow boundary layer (dotted lines). The values along the curves indicate different parameterised length L */L used for the parameterisation of the boundary layer. The dashed line indicates a mesh Peclet number of 2 under which the solution does not present any oscillation. The number of nodes N = 10
Rights and permissions
About this article
Cite this article
Blaise, S., de Brye, B., de Brauwere, A. et al. Capturing the residence time boundary layer—application to the Scheldt Estuary. Ocean Dynamics 60, 535–554 (2010). https://doi.org/10.1007/s10236-010-0272-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10236-010-0272-8