
Abstract
Both sensors of the SEIS instrument (VBBs and SPs) are mounted on the mechanical leveling system (LVL), which has to ensure a level placement on the Martian ground under currently unknown local conditions, and provide the mechanical coupling of the seismometers to the ground. We developed a simplified analytical model of the LVL structure in order to reproduce its mechanical behavior by predicting its resonances and transfer function. This model is implemented numerically and allows to estimate the effects of the LVL on the data recorded by the VBBs and SPs on Mars. The model is validated through comparison with the horizontal resonances (between 35 and 50 Hz) observed in laboratory measurements. These modes prove to be highly dependent of the ground horizontal stiffness and torque. For this reason, an inversion study is performed and the results are compared with some experimental measurements of the LVL feet’s penetration in a martian regolith analog. This comparison shows that the analytical model can be used to estimate the elastic ground properties of the InSight landing site. Another application consists in modeling the 6 sensors on the LVL at their real positions, also considering their sensitivity axes, to study the performances of the global SEIS instrument in translation and rotation. It is found that the high frequency ground rotation can be measured by SEIS and, when compared to the ground acceleration, can provide ways to estimate the phase velocity of the seismic surface waves at shallow depths. Finally, synthetic data from the active seismic experiment made during the HP3 penetration and SEIS rotation noise are compared and used for an inversion of the Rayleigh phase velocity. This confirms the perspectives for rotational seismology with SEIS which will be developed with the SEIS data acquired during the commissioning phase after landing.


























Similar content being viewed by others
References
D.L. Anderson, W.F. Miller, G.V. Latham, Y. Nakamura, M.N. Toksöz, A.M. Dainty, F.K. Duennebier, A.R. Lazarewicz, R.L. Kovach, T.C.D. Knight, Seismology on Mars. J. Geophys. Res. 82, 4524–4546 (1977)
C. Bagaini, C. Barajas-Olalde, Assessment and compensation of inconsistent coupling conditions in point-receiver land seismic data. Geophys. Prospect. 55, 39–48 (2007). https://doi.org/10.1111/j.1365-2478.2006.00606.x
W.B. Banerdt, S. Smrekar, K. Hurst, P. Lognonné, T. Spohn, S. Asmar, D. Banfield, L. Boschi, U. Christensen, V. Dehant, W. Folkner, D. Giardini, W. Goetz, M. Golombek, M. Grott, T. Hudson, C. Johson, G. Kargl, N. Kobayashi, J. Maki, D. Mimoun, A. Mocquet, P. Morgan, M. Panning, W.T. Pike, J. Tromp, T. van Zoest, R. Weber, M. Wieczorek (the InSight Team), Insight: a Discovery mission to explore the interior of Mars, in Proc. 44th Lunar Planet. Sci. Conf., Lunar and Planetery Institute, Houston (2013), p. 115
M. Bernauer, A. Fichtner, H. Igel, Inferring Earth structure from combined measurements of rotational and translational ground motions. Geophysics 74(6), WCD41–WCD47 (2009). https://doi.org/10.1190/1.3211110
J. Brokešová, J. Málek, J.R. Evans, Note: Rotaphone, a new self-calibrated six-degree-of-freedom seismic sensor. Rev. Sci. Instrum. 83(8), 086108 (2012)
CNES, Internal M-ICD (Mechanical Interface Control Document) of SEIS instrument of InSight mission (2017)
S. De Raucourt, T. Gabsi, N. Tanguy, D. Mimoun, P. Lognonne, J. Gagnepain-Beyneix, W. Banerdt, S. Tillier, K. Hurst, The VBB SEIS experiment of InSight, in 39th COSPAR Scientific Assembly, COSPAR Meeting, vol. 39 (2012), p. 429
P. Delage, F. Karakostas, A. Dhemaied, M. Belmokhtar, P. Lognonné, M. Golombek, E. De Laure, K. Hurst, J.-C. Dupla, S. Kedar, Y.J. Cui, B. Banerdt, An investigation of the mechanical properties of some Martian regolith simulants with respect to the surface properties at the InSight mission landing site. Space Sci. Rev. 211, 191–213 (2017). https://doi.org/10.1007/s11214-017-0339-7
T. Forbriger, About the nonunique sensitivity of pendulum seismometers to translational, angular, and centripetal acceleration. Bull. Seismol. Soc. Am. 99, 1343–1351 (2009). https://doi.org/10.1785/0120080150
M. Golombek, D. Kipp, N. Warner, I.J. Daubar, R. Fergason, R. Kirk, R. Beyer, A. Huertas, S. Piqueux, N. Putzig, B.A. Campbell, G.A. Morgan, C. Charalambous, W.T. Pike, K. Gwinner, F. Calef, D. Kass, M. Mischna, J. Ashley, C. Bloom, N. Wigton, T. Hare, C. Schwartz, H. Gengl, L. Redmond, M. Trautman, J. Sweeney, C. Grima, I.B. Smith, E. Sklyanskiy, M. Lisano, J. Benardini, S. Smrekar, P. Lognonné, B. Banerdt, Selection of the InSight landing site. Space Sci. Rev. 211, 5–95 (2017). https://doi.org/10.1007/s11214-016-0321-9
M. Golombek, M. Grott, G. Kargl, J. Andrade, J. Marshall, N. Warner, N.A. Teanby, V. Ansan, E. Hauber, J. Voigt, R. Lichtenheldt, B. Knapmeyer-Endrun, I.J. Daubar, D. Kipp, N. Muller, P. Lognonné, C. Schmelzbach, D. Banfield, A. Trebi-Ollennu, J. Maki, S. Kedar, D. Mimoun, N. Murdoch, S. Piqueux, P. Delage, W.T. Pike, C. Charalambous, R. Lorenz, L. Fayon, A. Lucas, S. Rodriguez, P. Morgan, A. Spiga, M. Panning, T. Spohn, S. Smrekar, T. Gudkova, R. Garcia, D. Giardini, U. Christensen, T. Nicollier, D. Sollberger, J. Robertsson, K. Ali, B. Kenda, W.B. Banerdt, Geology and physical properties investigation by the InSight lander. Space Sci. Rev. 214(5), 1–52 (2018). https://doi.org/10.1007/s11214-018-0512-7, 2nd special issue
L.G. Holcomb, A direct method for calculating instrument noise levels in side-by-side seismometer evaluation (1989). Open File Rep. 89-214, U.S. Geolog. Surv.
H. Igel, M. Bernauer, J. Wassermann, K.U. Schreiber, Rotational seismology: theory, instrumentation, observations, applications, in Encyclopedia of Complexity and Systems Science (Springer, New York, 2015)
S. Kedar, J. Andrade, B. Banerdt, P. Delage, M. Golombek, M. Grott, T. Hudson, A. Kiely, M. Knapmeyer, B. Knapmeyer-Endrun, C. Krause, T. Kawamura, P. Lognonné, T. Pike, Y. Ruan, T. Spohn, N. Teanby, J. Tromp, J. Wookey, Analysis of regolith properties using seismic signals generated by InSight’s HP3 penetrator. Space Sci. Rev. 211, 315–337 (2017). https://doi.org/10.1007/s11214-017-0391-3
B. Knapmeyer-Endrun, N. Murdoch, B. Kenda, M.P. Golombek, M. Knapmeyer, L. Witte, N. Verdier, S. Kedar, P. Lognonné, W.B. Banerdt, Influence of body waves, instrumentation resonances, and prior assumptions on Rayleigh wave ellipticity inversion for shallow structure at the insight landing site. Space Sci. Rev. 214(5), 1–42 (2018), 2nd special issue
P. Lognonné, W.T. Pike, Planetary Seismometry (Cambridge University Press, Cambridge, 2015)
P. Lognonné, J.G. Beyneix, W.B. Banerdt, S. Cacho, J.F. Karczewski, M. Morand, Ultra broad band seismology on InterMarsNet. Planet. Space Sci. 44, 1237 (1996). https://doi.org/10.1016/S0032-0633(96)00083-9
P. Lognonné, B.W. Banerdt, D. Giardini, T. Pike, U. Christensen, P. Laudet, S. de Raucourt, P. Zweifel, S. Calcut, M. Bierwirth, K. Hurst, F. Ijpelaan, J. Umland, R. Roger Llorca, S. Larson, R. Garcia, S. Kedar, B. Knapmeyer-Endrun, D. Mimoun, A. Mocquet, M. Panning, R. Weber, A. Sylvestre-Baron, G. Pont, N. Verdier, L. Kerjean, T. Hoffman, J. Willis, S. Smrekar, M. Eberhardt, A. Kramer, W. Kühne, E.-P. Miettinen, M. Monecke, J.P. Scheffler, C. Aicardi, K. Brethomé, C. Brysbaert, T. Carlier, J.M. Desmarres, D. Faye, R. Gonzalez, L. Luno, J.M. Mouret, M. Nonon, A. Paillet, G. Perez, B. Pouilloux, A. Rosak, I. Savin de Larclause, N. Toulemont, B. Vella, C. Yana, P. Delage, L. Fayon, N. Murdoch, R. Widmer-Schnidrig, SEIS: the Seismic Experiment for Internal Structure of InSight. Space Sci. Rev. (2018), 2nd special issue
D. Mimoun, N. Murdoch, P. Lognonné, K. Hurst, W.T. Pike, J. Hurley, T. Nébut, W.B. Banerdt, The noise model of the SEIS seismometer of the InSight Mission to Mars. Space Sci. Rev. 211, 383–428 (2017). https://doi.org/10.1007/s11214-017-0409-x
P. Morgan, M. Grott, B. Knapmeyer-Endrun, M. Golombek, P. Delage, P. Lognonné, S. Piqueux, I. Daubar, N. Murdoch, C. Charalambous, W.T. Pike, N. Muller, A. Hagermann, M. Siegler, R. Lichtenheldt, N. Teanby, S. Kedar, A pre-landing assessment of regolith properties at the insight landing site. Space Sci. Rev. 214(6), 1–47 (2018), 2nd special issue
R. Myhill, N. Teanby, J. Wookey, Frequency dependence of seismic attenuation and coupling through Mars’ regolith: implications for the InSight mission. Space Sci. Rev. (2018). https://doi.org/10.1007/s11214-018-0514-5, 2nd special issue
Y. Nakamura, D.L. Anderson, Martian wind activity detected by a seismometer at Viking lander 2 site. Geophys. Res. Lett. 6, 499–502 (1979)
G.L. Pavlis, F.L. Vernon, Calibration of seismometers using ground noise. Bull. Seismol. Soc. Am. 84, 1243–1255 (1994)
G.H. Peters, W. Abbey, G.H. Bearman, G.S. Mungas, J.A. Smith, R.C. Anderson, S. Douglas, L.W. Beegle, Mojave Mars simulant—characterization of a new geologic Mars analog. Icarus 197, 470–479 (2008). https://doi.org/10.1016/j.icarus.2008.05.004
H.G. Poulos, E.H. Davis, Elastic Solutions for Soil and Rock Mechanics (Wiley, New York, 1974)
A.T. Ringler, C.R. Hutt, J.R. Evans, L.D. Sandoval, A comparison of seismic instrument noise coherence analysis techniques. Bull. Seismol. Soc. Am. 101, 558–567 (2011)
C. Schmelzbach, S. Donner, H. Igel, D. Sollberger, T. Taufiqurrahman, F. Bernauer, M. Hausler, C. Van Renterghem, J. Wassermann, J. Robertsson, Advances in 6-C seismology: applications of combined translational and rotational motion measurements in global and exploration seismology. Geophysics 83, Issue(3), 1–58 (2018). https://doi.org/10.1190/geo2017-0492.1
D. Sollberger, C. Schmelzbach, J.O.A. Robertsson, S.A. Greenhalgh, Y. Nakamura, A. Khan, The shallow elastic structure of the lunar crust: new insights from seismic wavefield gradient analysis. Geophys. Res. Lett. 43, 10 (2016). https://doi.org/10.1002/2016GL070883
D. Sollberger, S.A. Greenhalgh, C. Schmelzbach, C. Van Renterghem, J.O.A. Robertsson, 6-C polarization analysis using point measurements of translational and rotational ground-motion: theory and applications. Geophys. J. Int. 213, 77–97 (2018). https://doi.org/10.1093/gji/ggx542
P. Spudich, L.K. Steck, M. Hellweg, J.B. Fletcher, L.M. Baker, Transient stresses at Parkfield, California, produced by the M 7.4 Landers earthquake of June 28, 1992: observations from the UPSAR dense seismograph array. J. Geophys. Res. 100, 675–690 (1995). https://doi.org/10.1029/94JB02477
N. Teanby, J. Stevanović, J. Wookey, N. Murdoch, J. Hurley, R. Myhill, N.E. Bowles, S.B. Calcutt, W.T. Pike, Seismic coupling of short-period wind noise through Mars’ regolith for NASA’s InSight lander. Space Sci. Rev. 211, 485–500 (2017). https://doi.org/10.1007/s11214-016-0310-z
N.H. Warner, M.P. Golombek, J. Sweeney, R. Fergason, R. Kirk, C. Schwartz, Near surface stratigraphy and regolith production in southwestern Elysium Planitia, Mars: Implications of Hesperian-Amazonian terrains and the InSight lander mission. Space Sci. Rev. 211, 147–190 (2017). https://doi.org/10.1007/s11214-017-0352-x
Acknowledgements
This is IPGP contribution xx and InSight contribution yy. L.F. acknowledges the financial support of ANR-11-IDEX-0005-02 and the additional support of ANR-SIMARS F.K. acknowledges the financial support of the UnivEarthS Labex program at Sorbonne Paris Cité (ANR-10-LABX-0023 and ANR-11-IDEX-0005-02) and of the SODERN company for his Ph.D. support. The French team acknowledges the support of the French Space Agency CNES for the overall SEIS developments.
Author information
Authors and Affiliations
Corresponding author
Additional information
The InSight Mission to Mars II
Edited by William B. Banerdt and Christopher T. Russell
Appendix: Rotation Sensitivities of the VBB Sensors
Appendix: Rotation Sensitivities of the VBB Sensors
As shown by Forbriger (2009), pendulum and therefore VBBs have a rotational sensitivity in addition of their acceleration sensitivity along their sensitivity direction. VBBs are in addition oblique sensors and use gravity to lower their eigenfrequency and increase their mechanical sensitivity, which must also be taken into account.
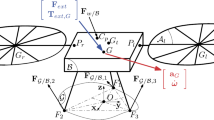
Let us consider one of the VBB sensor and note \(G\) its center of mass and \(M\) a part of the proof mass. The acceleration sensed by the point \(M\) can be expressed as
where \(\overrightarrow{\gamma }\) is the acceleration of the VBB pivot and \(\overrightarrow{\dot{\varOmega }}\) is the absolute rotation rate with respect to a fixed frame and \(\overrightarrow{\ddot{\varOmega }}\) the rotation acceleration. \(\overrightarrow{\varOmega }\) is therefore the sum of the LVL rotation, noted hereafter \(\overrightarrow{\varOmega _{F}}\) and of the VBB pendulum rotation, noted \(\theta \overrightarrow{\pi }\) where \(\overrightarrow{\pi }\) the pivot directed vector (in trigonometric direction) and \(\theta \) is the rotation of the pendulum with respect to the equilibrium and recentered position. If we limit this expression to only the first order linear term, assuming the rotation to remain small due to the pendulum restoring forces, we can express the acceleration of \(M\)
where \(G_{0}\) and \(M_{0}\) are now the center of gravity of the mobile mass and point \(M\) both taken in their equilibrium positions. \(\ddot{\theta }\) is the second derivative of \(\theta \), \(\ddot{\varOmega }_{F}\) the rotation acceleration along the pivot direction and \(\overrightarrow{\gamma _{G}}\) is the full acceleration (including frame rotation) at the equilibrium center of gravity \(G_{0}\). By assuming that the pendulum of the VBB has one of its inertial moment axis along the pivot and computing the equation of angular momentum with respect to rotation around the pivot, we can finally write the pendulum equation of movement as:
where \(\mathcal{{M}}_{0}\) is the spring moment at recentered position, \(J\) is the VBB moment of inertia with respect to the pivot, \(C\) the spring/pivot stiffness, \(C_{R}\) the feedback force (as a function of the pendulum rotation), \(\overrightarrow{g}\) the Mars gravity and \(D\) the distance from pivot to center of gravity. Note that when the VBB is perturbed, \(G\) is moving such that:
where \(\overrightarrow{n}\) is the direction sensitivity vector. When the infinetesimal rotation \(\overrightarrow{\varOmega }\) is perturbing the VBB in addition to ground acceleration, the local gravity is changing. If we rewrite the previous equation in the moving frame of the VBB sensor, the gravity can then be written as
These two equations leads to the pendulum dynamic equation. When we note that
this can be rewritten as:
where \(\alpha \) is the angle of \(\overrightarrow{p}\) with vertical (see Fig. 37 of Lognonné et al. 2018 for VBB pendulum geometry). The amplitude of the first rotation term is related to the non-point character of the pendulum. For the VBBs family, we have \(J = 2.56 \times 10^{-4}~\mbox{kg}\,\mbox{m}^{2}\), \(D= 0.0256\mbox{ m}\) and \(m=190\mbox{ g}\) and therefore \(\frac{J - mD^{2} }{mD^{2}}\) is about 1.06. For a rotation acceleration of about \(\ddot{\varOmega }_{F} = \omega \frac{\gamma _{z} }{c}\), where \(\omega \) is the angular frequency and \(c\) the wave phase velocity, the ratio of the second term to acceleration is \(\frac{ D \omega }{c \sin \alpha } = 2\%\) for 10 Hz and \(c=150\mbox{ m}/\mbox{s}\). This is therefore significant but does not request more than 5% of moment of inertia or location of center of gravity errors to generate errors of less than 0.1%. The third term is small and for seismic waves detection the ratio between rotation term and acceleration is of the order of \(\frac{g_{0} }{\tan \alpha \omega c}\). On Mars, the last term will be smaller than \(10^{-3}\) for frequencies larger than 7 Hz and phase velocity of 150 m/s. This is expected to be significantly lower than the calibration error of the VBBs and SPs and we can therefore neglect this third rotation sensitivity term of the VBBs for the HP3 surface waves signals in our simulation, which are expected in the 10–50 Hz bandwidth.
Rights and permissions
About this article

Cite this article
Fayon, L., Knapmeyer-Endrun, B., Lognonné, P. et al. A Numerical Model of the SEIS Leveling System Transfer Matrix and Resonances: Application to SEIS Rotational Seismology and Dynamic Ground Interaction. Space Sci Rev 214, 119 (2018). https://doi.org/10.1007/s11214-018-0555-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11214-018-0555-9