
Improved Goldstein Interferogram Filter Based on Local Fringe Frequency Estimation


Abstract
:1. Introduction
2. Improved Goldstein Filter Based on Local Frequency Estimation
2.1. Analysis of the Goldstein Filter
2.2. Combination of Goldstein Filter and Local Frequency Estimation
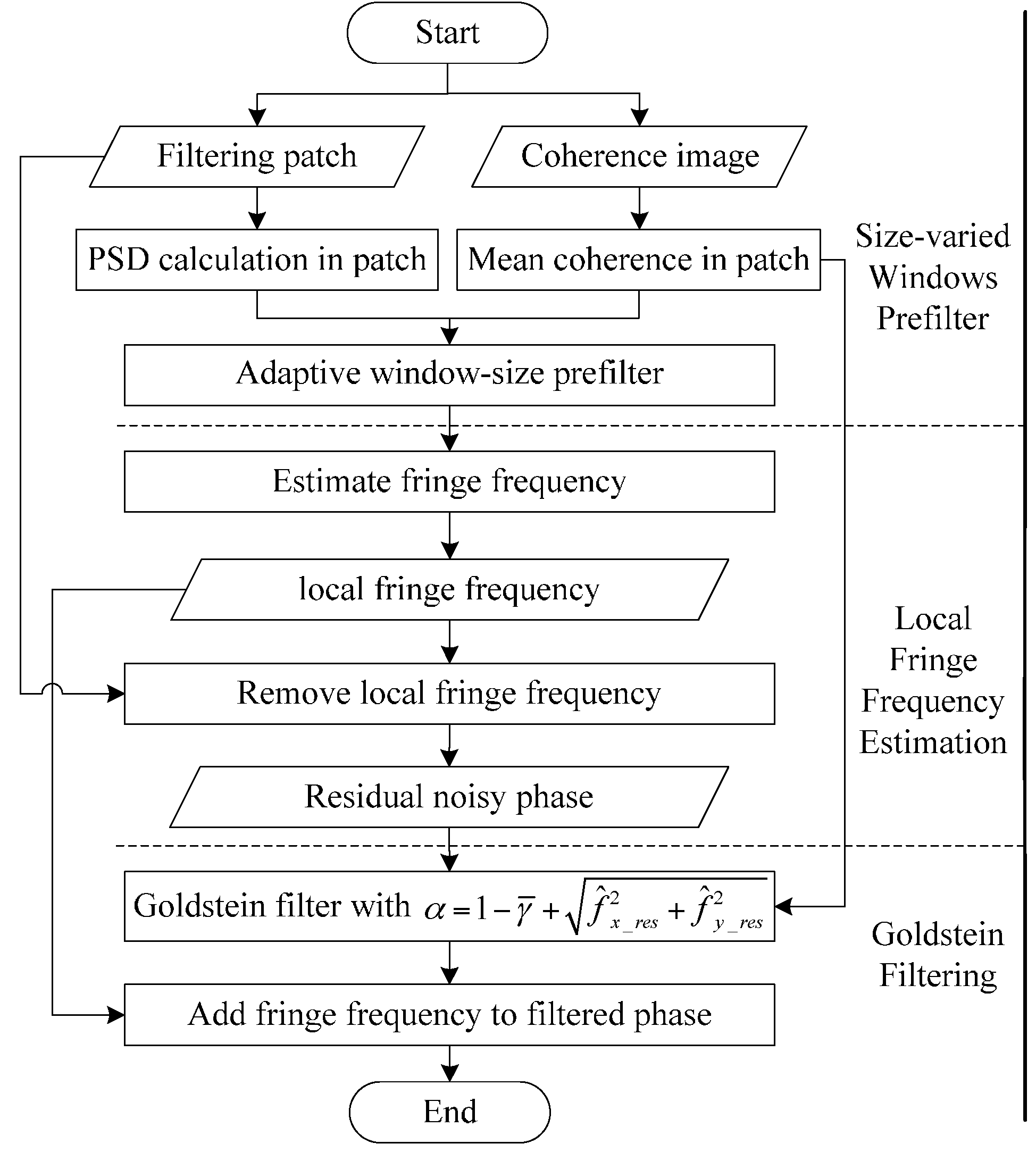
- The proposed adaptive mean filter is applied to ensure the accuracy of fringe frequency estimation. The prefilter window size, limited by the critical averaging look number, is varying according to the mean coherence value and PSD.
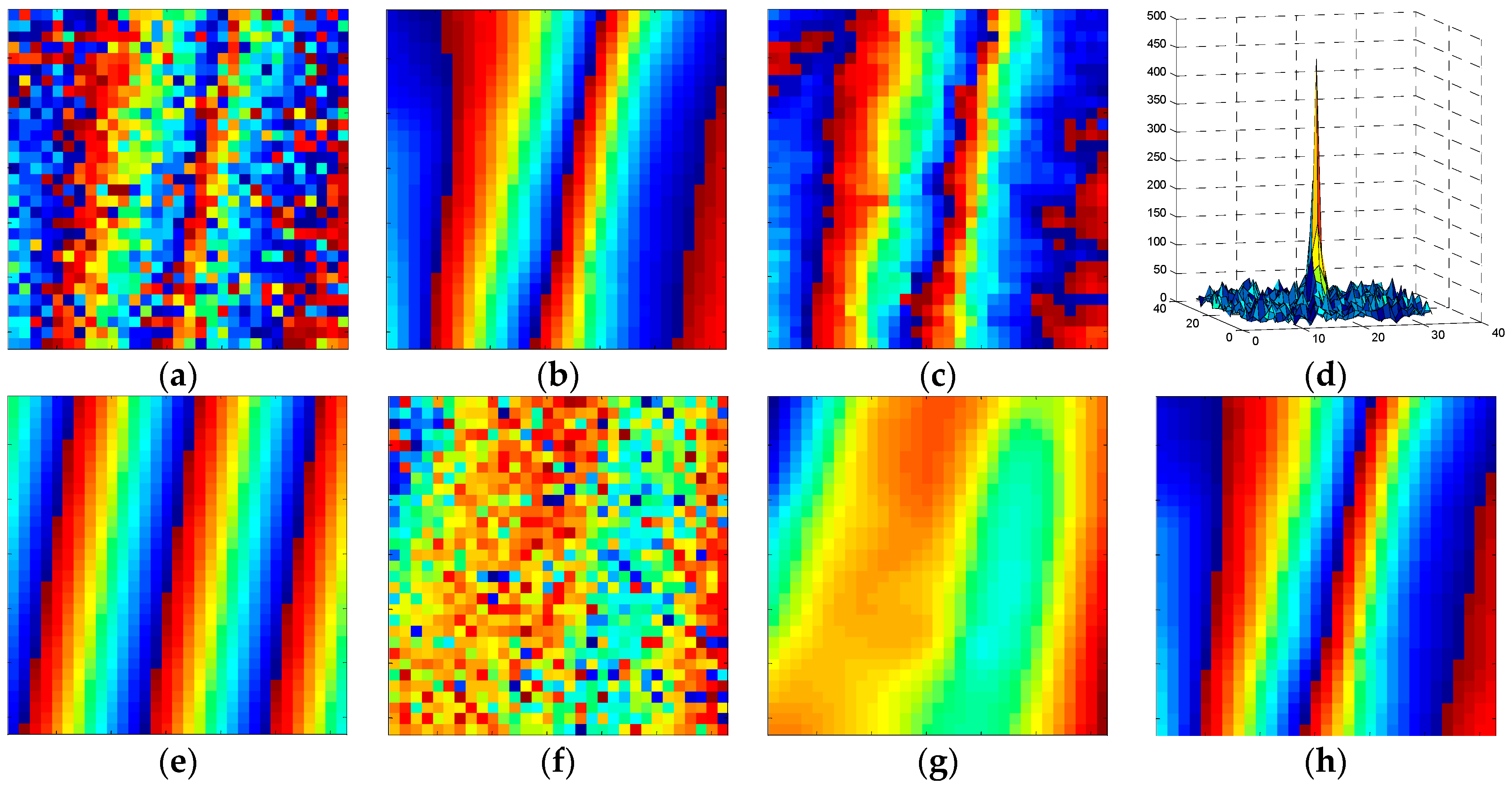
- Fringe frequency estimation using Fourier transform is performed after adaptive mean prefiltering. Note that the estimated principal phase component is removed from the original noisy phase rather than the prefiltered phase. Hence, the prefiltering operation improves the accuracy of fringe frequency estimation and does not reduce the resolution of the interferogram.
- The Goldstein filter is utilized to smooth the residual noisy phase with modified parameter dependent on both the coherence map and residual phase frequency. The filtered residual phase and the removed fringe frequency are ultimately combined to derive the filtered interferogram.
2.2.1. Size-Varied Windows Prefilter
2.2.2. Principal Phase Component Estimation
2.2.3. Residual Noisy Phase Filter
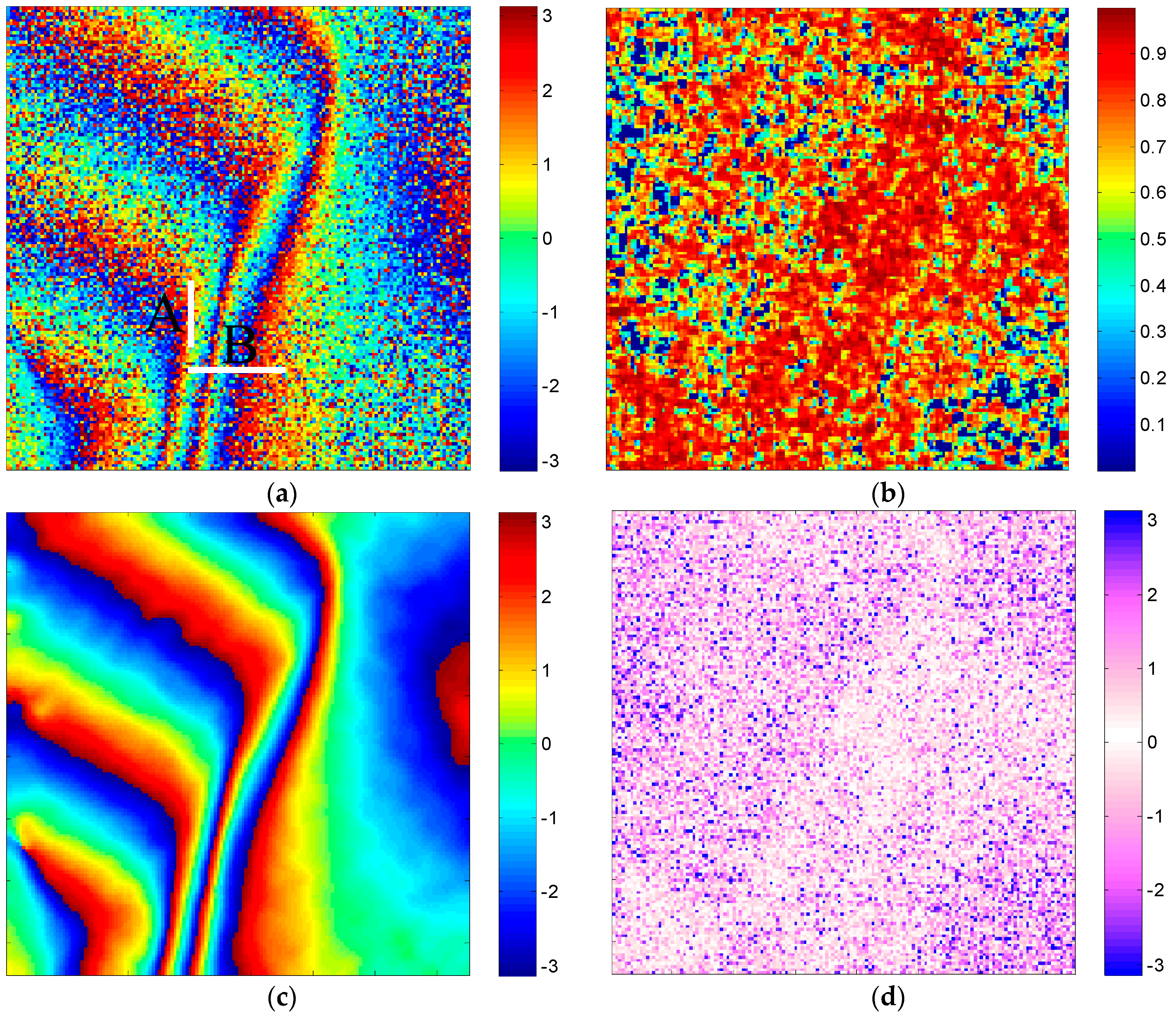
3. Results and Analysis
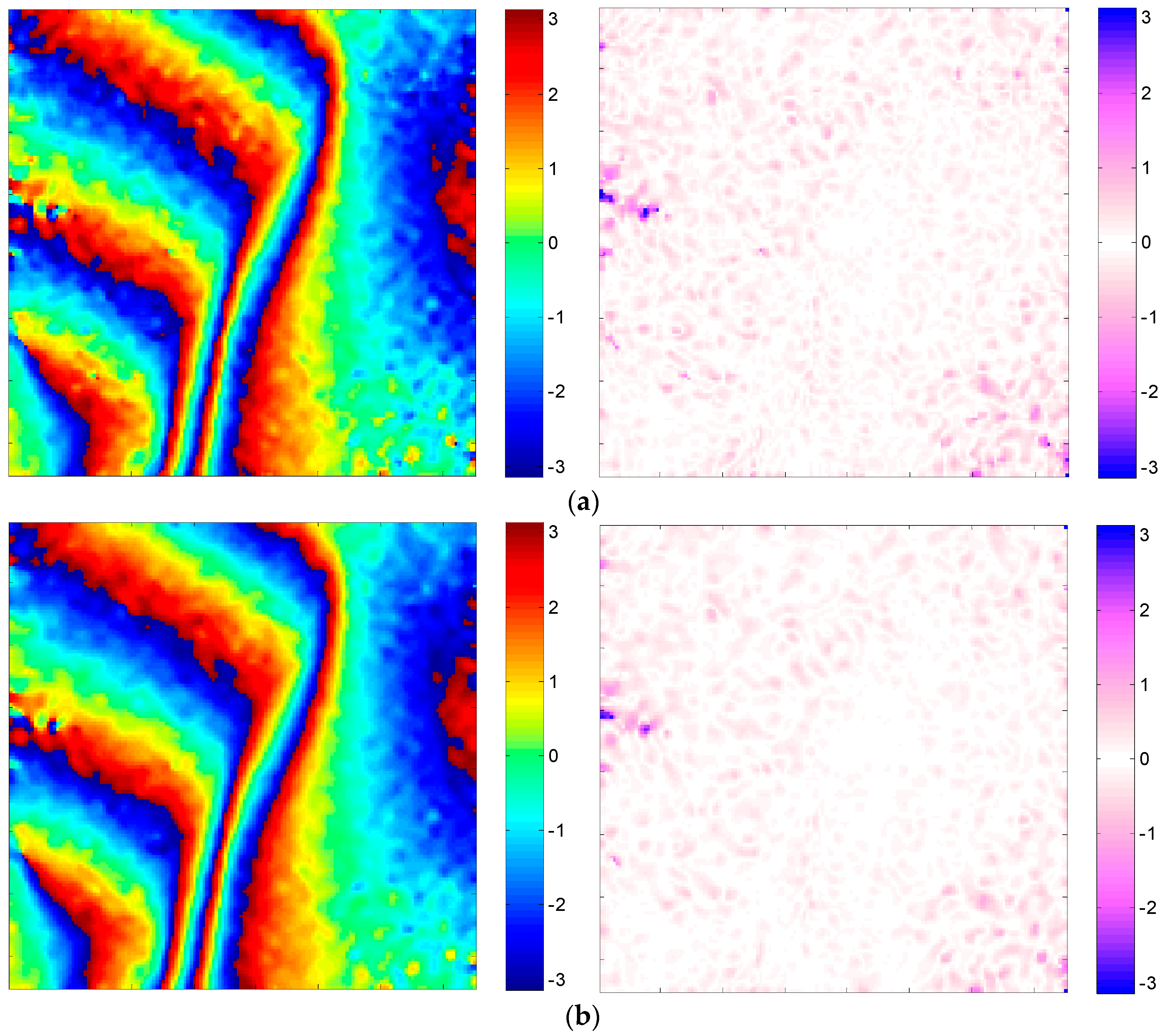
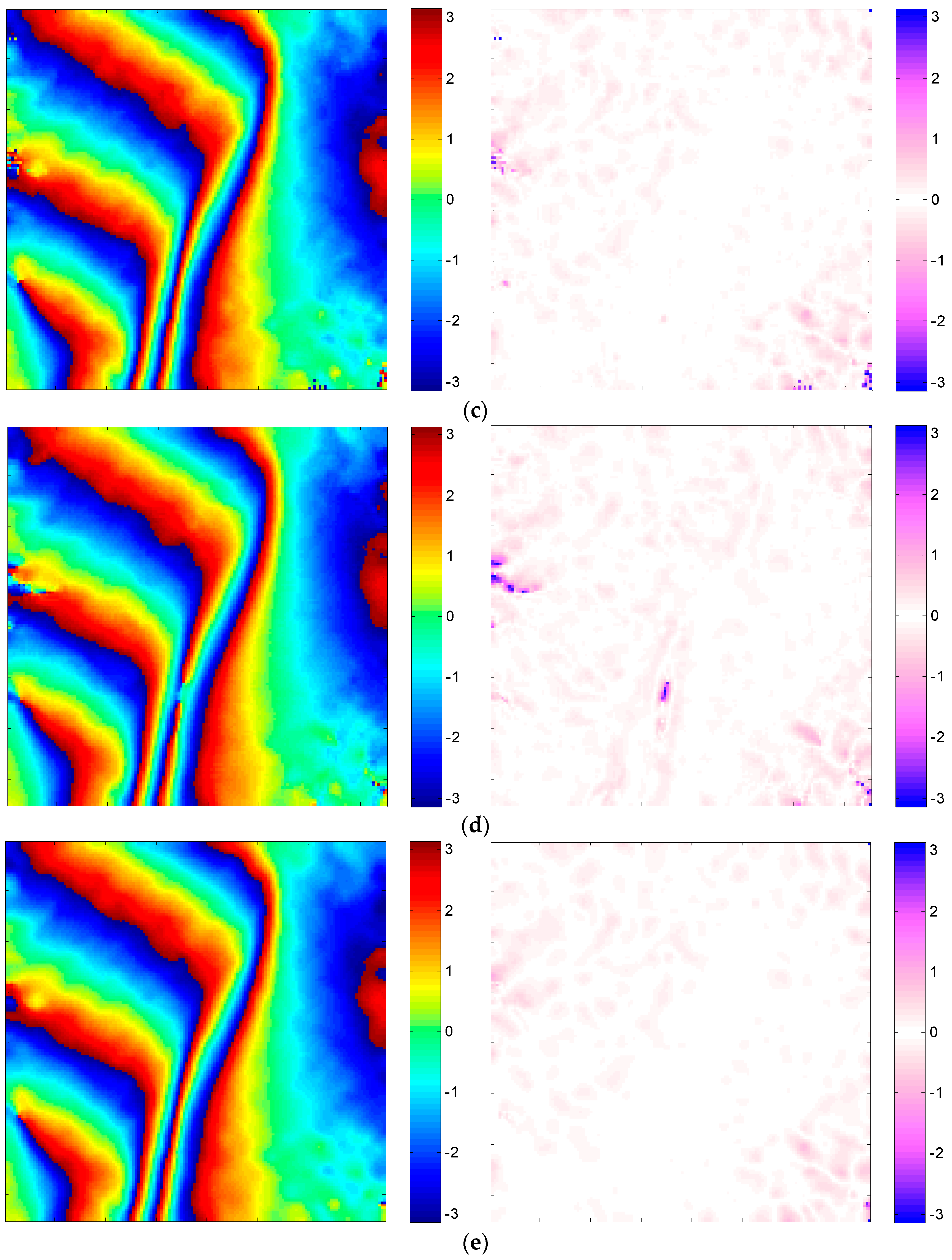
3.1. Comparison with Our Modifications
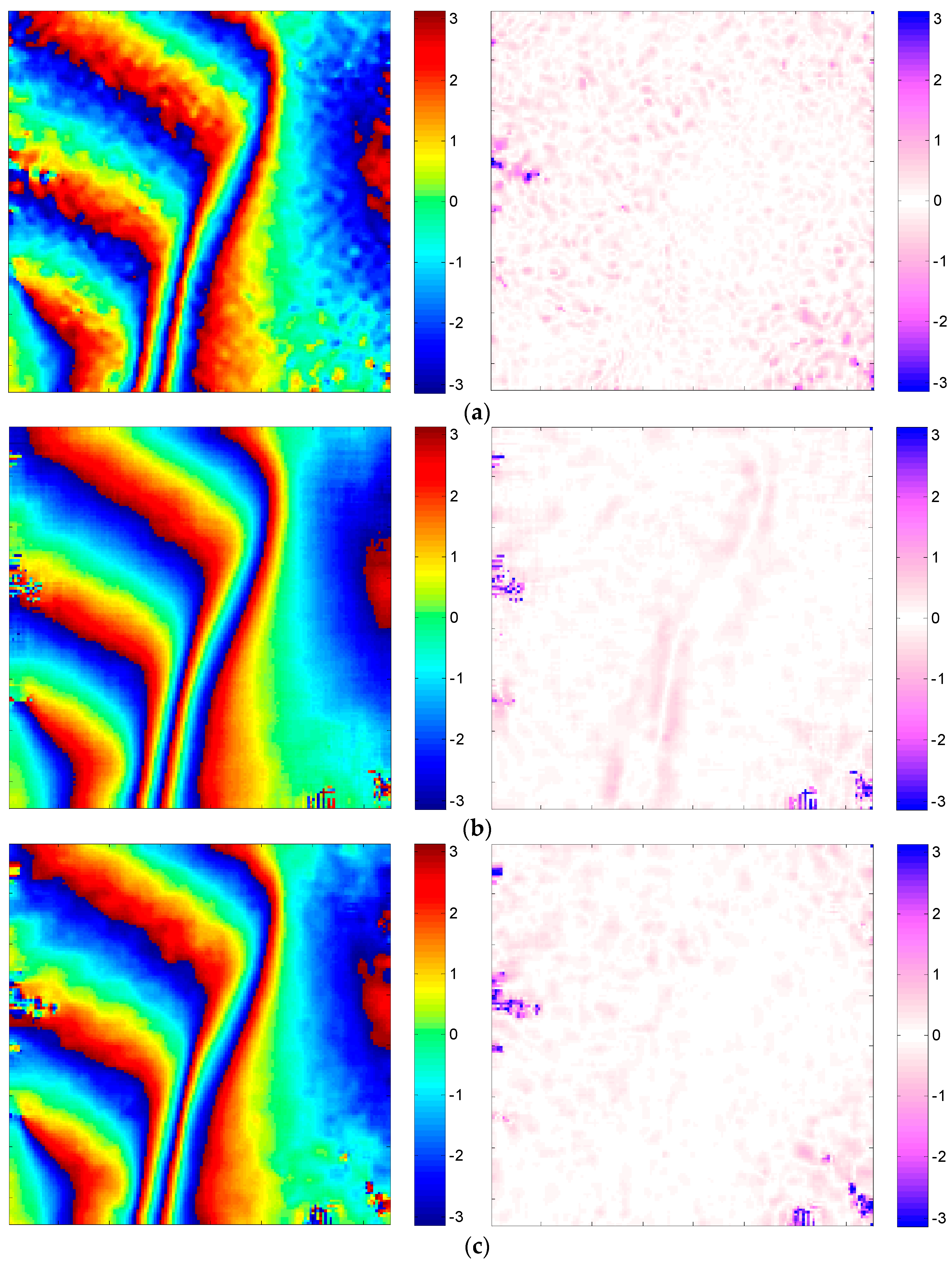
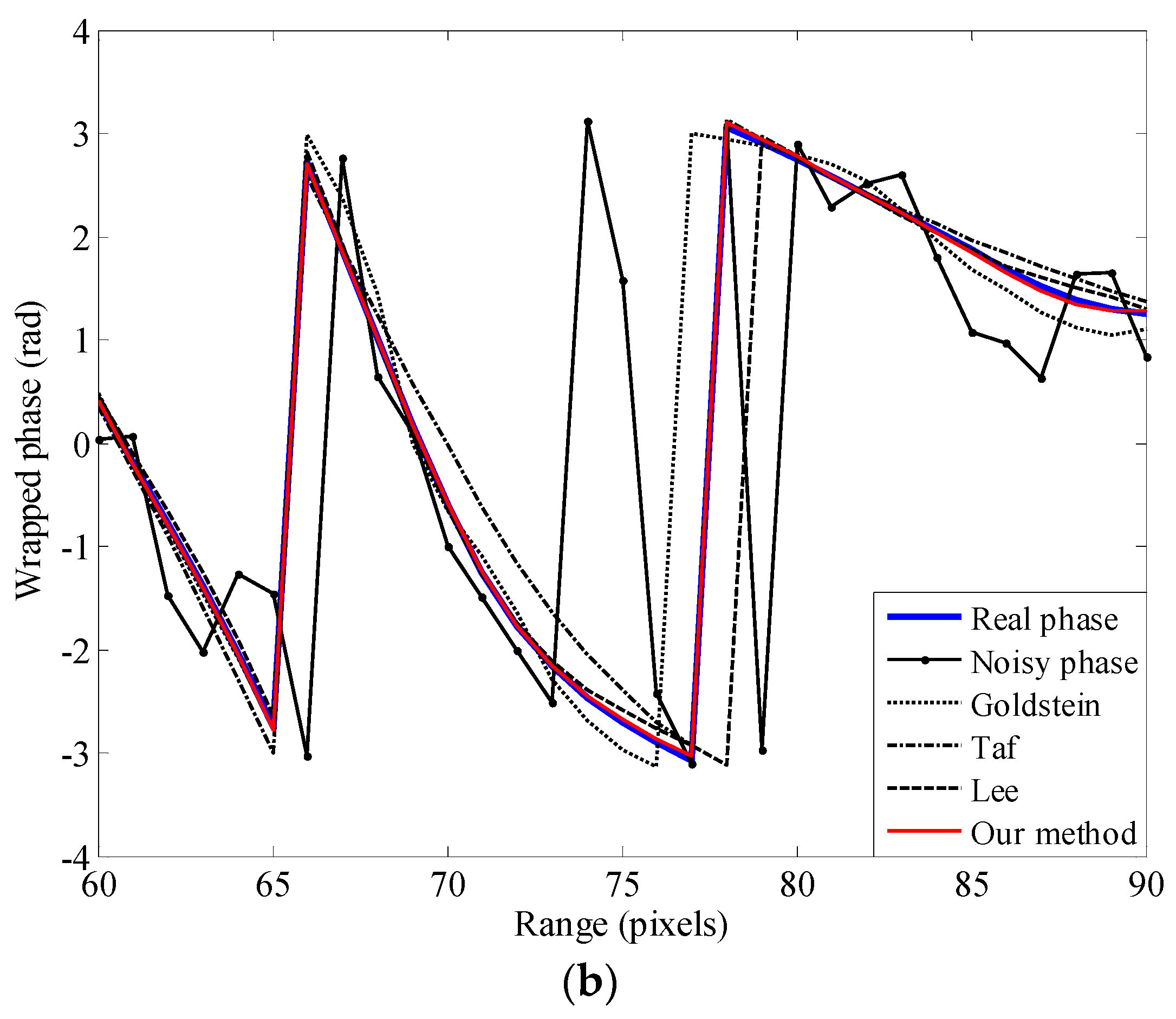
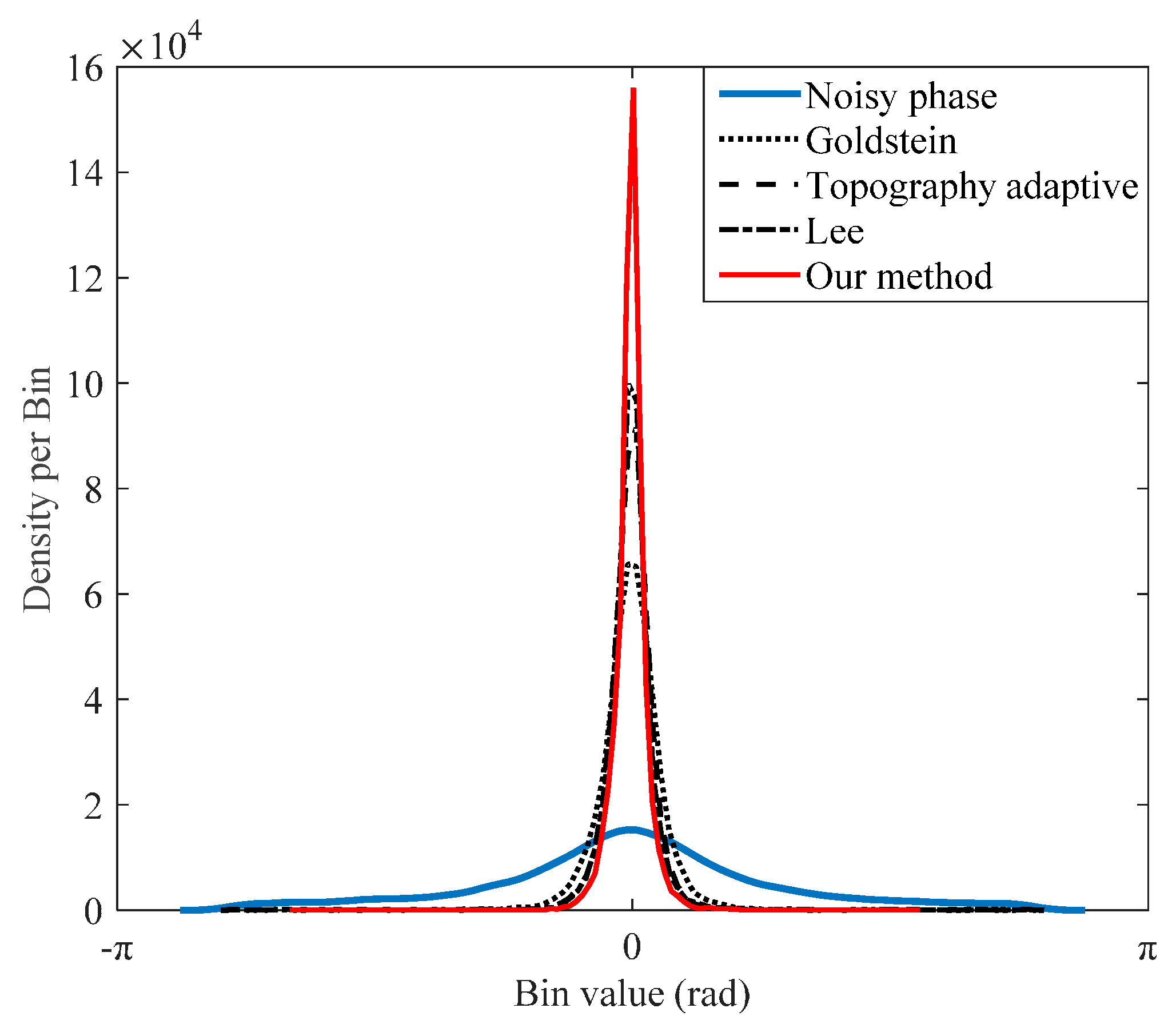
3.2. Comparison with Other Filters
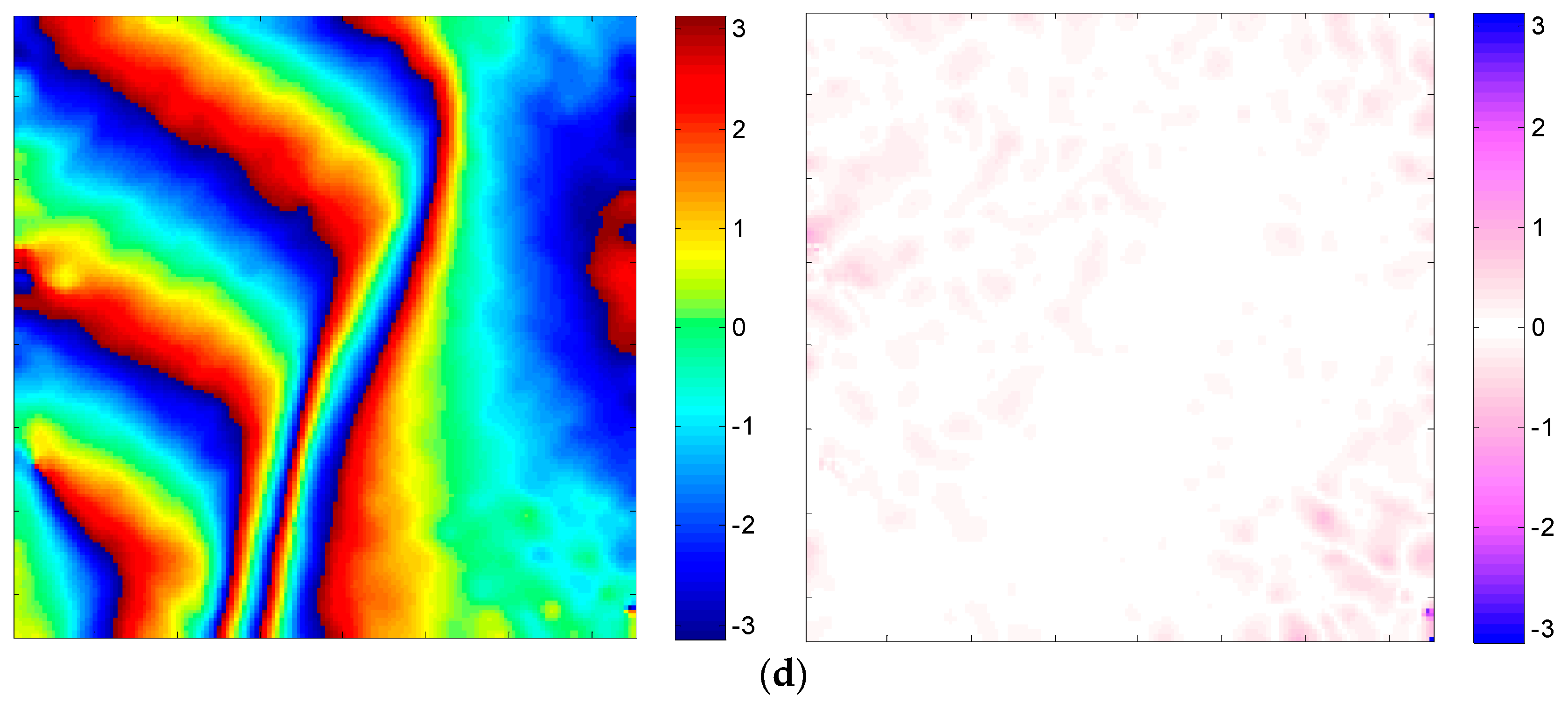
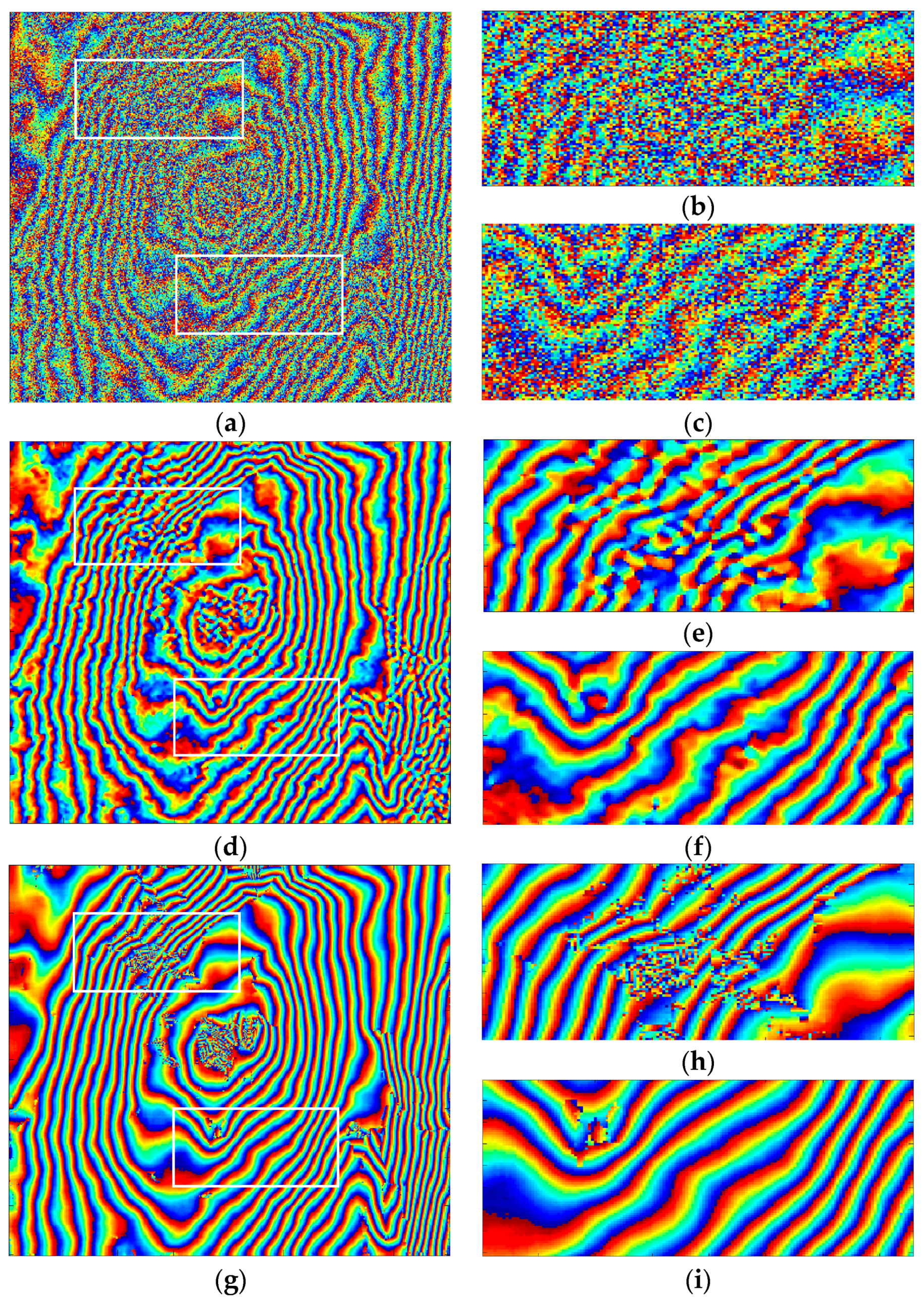
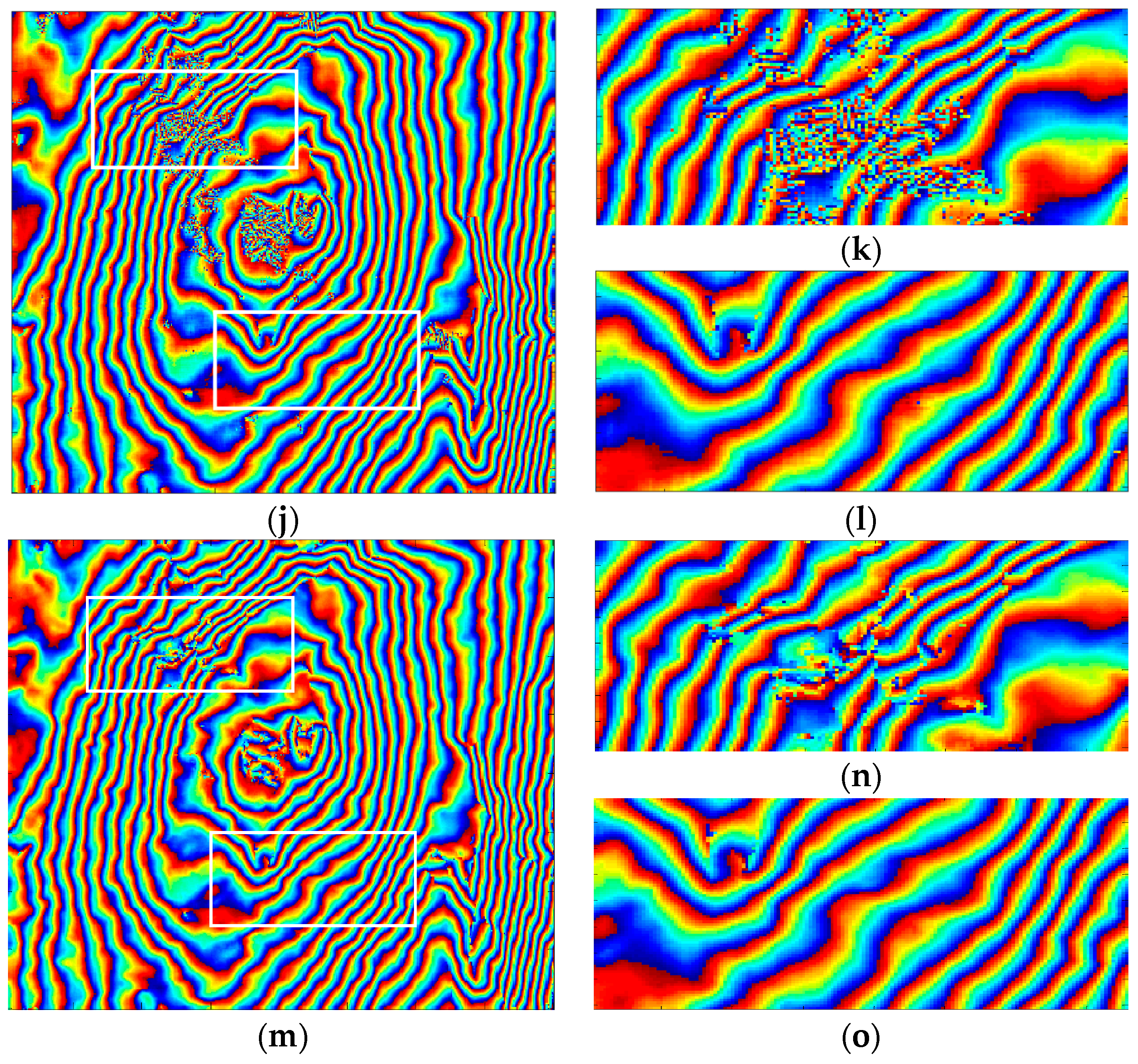
3.3. Real Data Experiment
4. Conclusions
- The adaptive prefiltering operation based on phase standard deviation and coherence can effectively improve the accuracy of local fringe frequency estimation for areas incoherent or with a high level of noise without reducing the resolution of the interferogram.
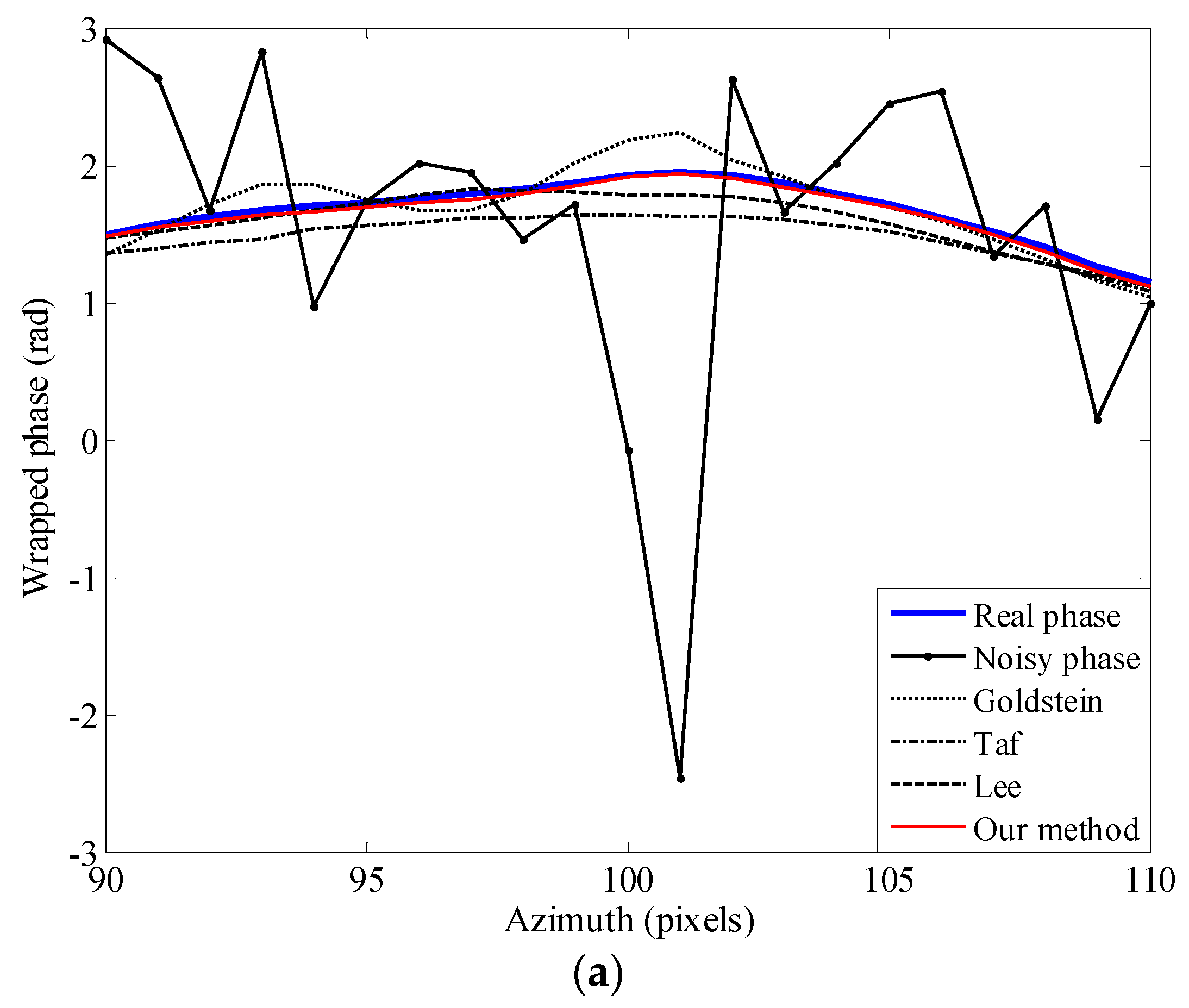
- The fringe frequency estimation and slope compensation before applying the Goldstein filter can significantly enhance its performance in edge preservation.
- The modified Goldstein parameter , varying with coherence and the dominant frequency component in the residual noise phase, provides a promising result in noise reduction.
- Fringe frequency compensation and residual phase filtering are combined to reduce the number of phase residues significantly while preserving the fringe details well, even for fringes with strong curvatures.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Massonnet, D.; Feigl, K.L. Radar interferometry and its application to changes in the Earth’s surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef]
- Li, X.; Lehner, S.; Rosenthal, W. Investigation of ocean surface wave refraction using TerraSAR-X data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 830–840. [Google Scholar]
- Romeiser, R.; Suchandt, S.; Runge, H.; Steinbrecher, U.; Grunler, U. First analysis of TerraSAR-X along-track InSAR-derived current fields. IEEE Trans. Geosci. Remote Sens. 2010, 48, 820–829. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic Aperture Radar Interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Bamler, R.; Hartl, P. Synthetic Aperture Radar Interferometry. Inverse Probl. 1998, 14, R1–R54. [Google Scholar] [CrossRef]
- Kenyi, L.; Kaufmann, V. Estimation of rock glacier surface deformation using SAR interferometry data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1512–1515. [Google Scholar] [CrossRef]
- Kugler, F.; Lee, S.; Hajnsek, I.; Papathanassiou, K.P. Forest height estimation by means of Pol-InSAR data inversion: The role of the vertical wavenumber. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5294–5311. [Google Scholar] [CrossRef]
- Wu, Z.; Xu, H.; Li, J.; Liu, W. Research of 3-D deceptive interfering method for single-pass spaceborne InSAR. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2834–2846. [Google Scholar] [CrossRef]
- Romeiser, R.; Runge, H. Theoretical evaluation of several possible along-track InSAR modes of TerraSAR-X for ocean current measurements. IEEE Trans. Geosci. Remote Sens. 2007, 45, 21–35. [Google Scholar] [CrossRef]
- Xu, H.; Kang, C. Equivalence analysis of accuracy of geolocation models for spaceborne InSAR. IEEE Trans. Geosci. Remote Sens. 2010, 48, 480–490. [Google Scholar]
- Graham, L.C. Synthetic interferometric radar for topographic mapping. Proc. IEEE 1974, 62, 763–768. [Google Scholar] [CrossRef]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef]
- Xu, H.; Wu, Z.; Liu, W.; Li, J.; Feng, Q. Analysis of the effect of interference on InSAR. IEEE Sens. J. 2015, 15, 5659–5668. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, Q.; Ding, X.; Zhang, J. An iterative Goldstein SAR interferogram filter. Int. J. Remote Sens. 2011, 33, 3443–3455. [Google Scholar] [CrossRef]
- Suo, Z.; Li, Z.; Bao, Z. A new strategy to estimate local fringe frequencies for InSAR phase noise reduction. IEEE Geosci. Remote Sens. Lett. 2010, 7, 771–775. [Google Scholar] [CrossRef]
- Suo, Z.; Zhang, J.; Li, M.; Zhang, Q.; Fang, C. Improved InSAR phase noise filter in frequency domain. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1185–1195. [Google Scholar] [CrossRef]
- Li, H.; Song, H.; Wang, R.; Wang, H.; Liu, G.; Chen, R.; Li, X.; Deng, Y.; Balz, T. A modification to the complex-valued MRF modeling filter of interferomtric SAR phase. IEEE Geosci. Remote Sens. Lett. 2015, 12, 681–685. [Google Scholar]
- Lee, J.S.; Papathanassiou, K.P.; Ainsworth, T.L.; Grunes, M.R.; Reigber, A. A new technique for noise filtering of SAR interferometric phase images. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1456–1465. [Google Scholar]
- Trouvé, E.; Nicolas, J.M.; Maître, H. Improving phase unwrapping techniques by the use of local frequency estimates. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1963–1972. [Google Scholar] [CrossRef]
- Wang, Q.; Huang, H.; Yu, A.; Dong, Z. An efficient and adaptive approach for noise filtering of SAR interferometric phase images. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1140–1144. [Google Scholar] [CrossRef]
- Cai, B.; Liang, D.; Dong, Z. A new adaptive multiresolution noise-filtering approach for SAR interferometric phase images. IEEE Geosci. Remote Sens. Lett. 2008, 5, 266–270. [Google Scholar]
- Goldstein, R.M.; Werner, C.L. Radar interferogram filtering for geophysical applications. Geophys. Res. Lett. 1998, 25, 4035–4038. [Google Scholar] [CrossRef]
- Baran, I.; Stewart, M.P.; Kampes, B.M.; Perski, Z.; Lilly, P. A modification to the Goldstein radar interferogram filter. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2114–2118. [Google Scholar] [CrossRef]
- Song, R.; Guo, H.; Liu, G.; Perski, Z.; Fan, J. Improved Goldstein SAR interferogram filter based on empirical mode decomposition. IEEE Geosci. Remote Sens. Lett. 2014, 11, 399–403. [Google Scholar] [CrossRef]
- Song, R.; Guo, H.; Liu, G.; Perski, Z.; Yue, H.; Han, C.; Fan, J. Improved Goldstein SAR interferogram filter based on adaptive-neighborhood technique. IEEE Geosci. Remote Sens. Lett. 2015, 12, 140–144. [Google Scholar] [CrossRef]
- Lu, Y.; Lei, Z.; Li, H.; Ni, W.; Yan, W.; Bian, H. A modification to Goldstein algorithm for TerraSAR-X interferometic phase filter. In Proceedings of the IEEE 2010 the 2nd International Conference on Computer and Automation Engineering, Singapore, 26–28 February 2010; Volume 4, pp. 153–157.
- Xu, H.; Chen, J.; Zhou, Y.; Li, C. A new concept: Critical number of looks for multilook processing method for InSAR noise suppression. Int. Conf. Space Inf. Technol. Int. 2005, 5985. [Google Scholar] [CrossRef]
- Zhu, D.; Zhu, D. Improving the coherence for InSAR processing and coherence estimation using the linear phase model. Acta Electron. Sin. 2005, 33, 1594–2005. [Google Scholar]
- El-Behery, I.; Macphie, R.H. Radio source parameter estimation by maximum likelihood processing of variable baseline correlation interferometer data. IEEE Trans. Antennas Propag. 1976, 24, 163–173. [Google Scholar] [CrossRef]
- Zhu, D.; Zhu, Z.; Xie, Q. A topography adaptive interferogram filter based on local frequency estimation. Acta Electron. Sin. 2002, 30, 1853–1856. [Google Scholar]
- Franceschetti, G.; Iodice, A.; Migliaccio, M.; Riccio, D. A novel across-track SAR interferometry simulator. IEEE Trans. Geosci. Remote Sens. 1998, 36, 950–962. [Google Scholar] [CrossRef]
- Guarnieri, A.M.; Prati, C. SAR interferometry: A “Quick and dirty” coherence estimator for data browsing. IEEE Trans. Geosci. Remote Sens. 1997, 35, 660–669. [Google Scholar] [CrossRef]
- Eineder, M. Efficient simulation of SAR interferograms of large areas and of rugged terrain. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1415–1427. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Interferogram | Residues | EPI | MSE |
|---|---|---|---|
| Real phase | 0 | 1 | 0 |
| Noisy phase | 3270 | 7.8684 | 1.3054 |
| Reference Goldstein | 14 | 1.3739 | 0.0707 |
| Modification 1 | 5 | 1.2275 | 0.0461 |
| Modification 2 | 20 | 1.0921 | 0.0295 |
| Modification 3 | 15 | 1.0725 | 0.0447 |
| Our method | 2 | 1.0362 | 0.0171 |
| Interferogram | Residues | EPI | MSE |
|---|---|---|---|
| Real phase | 0 | 1 | 0 |
| Noisy phase | 3270 | 7.8684 | 1.3054 |
| Reference Goldstein | 14 | 1.3739 | 0.0707 |
| Topography adaptive | 73 | 1.1515 | 0.0709 |
| Lee filter | 48 | 1.2059 | 0.0864 |
| Our method | 2 | 1.0362 | 0.0171 |
| Interferogram | Residues | Phase Standard Deviation | ||
|---|---|---|---|---|
| Magnitude | Improvement | Magnitude | Improvement | |
| Unfiltered | 32,956 | - | 1.5968 | - |
| Reference Goldstein | 853 | 97.41% | 0.8996 | 43.66% |
| Topography adaptive | 1263 | 96.17% | 0.9094 | 43.05% |
| Lee filter | 1982 | 93.98% | 0.9393 | 41.18% |
| Our method | 313 | 99.05% | 0.8903 | 44.24% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Q.; Xu, H.; Wu, Z.; You, Y.; Liu, W.; Ge, S. Improved Goldstein Interferogram Filter Based on Local Fringe Frequency Estimation. Sensors 2016, 16, 1976. https://doi.org/10.3390/s16111976
Feng Q, Xu H, Wu Z, You Y, Liu W, Ge S. Improved Goldstein Interferogram Filter Based on Local Fringe Frequency Estimation. Sensors. 2016; 16(11):1976. https://doi.org/10.3390/s16111976
Chicago/Turabian StyleFeng, Qingqing, Huaping Xu, Zhefeng Wu, Yanan You, Wei Liu, and Shiqi Ge. 2016. "Improved Goldstein Interferogram Filter Based on Local Fringe Frequency Estimation" Sensors 16, no. 11: 1976. https://doi.org/10.3390/s16111976