Energy Consumption of a Battery Electric Vehicle with Infinitely Variable Transmission




Abstract
:
1. Introduction
2. BEV Simulation Model

| Pinion-ring gear speed ratio | τdiff | 1:4.474 [-] |
| Tire radius | Rw | 0.29 [m] |
| Electric motor inertia | Im | 0.016 [kg·m2] |
| First gear ratio | τ1 | 1:2.724 [-] |
| Second gear ratio | τ2 | 1:1.251 [-] |
| Minimum CVT speed ratio | 0.4 [-] | |
| Maximum CVT speed ratio | 2.5 [-] | |
| Rolling friction coefficient—constant term | f0 | 0.01 [-] |
| Rolling friction coefficient—linear term | f1 | 0 [s·m−1] |
| Rolling friction coefficient—quadratic term | f2 | 6.5 × 10−6 [s2·m−2] |
| Aerodynamic drag coefficient | Cx | 0.32 [-] |
| Frontal area | S | 1.407 [m2] |
| Architectures | Transmission Mass [kg] | Vehicle Mass + 2 Passengers [kg] |
|---|---|---|
| Single-speed (1G) | 13 | 867 |
| Two-speed (2G) | 20 | 870 |
| Half Toroidal CVT (HT) | 22 | 872 |
| Full Toroidal CVT (FT) | 22 | 872 |
| IVT Type I (IVT-I) | 30 | 880 |
| IVT Type II (IVT-II) | 30 | 880 |
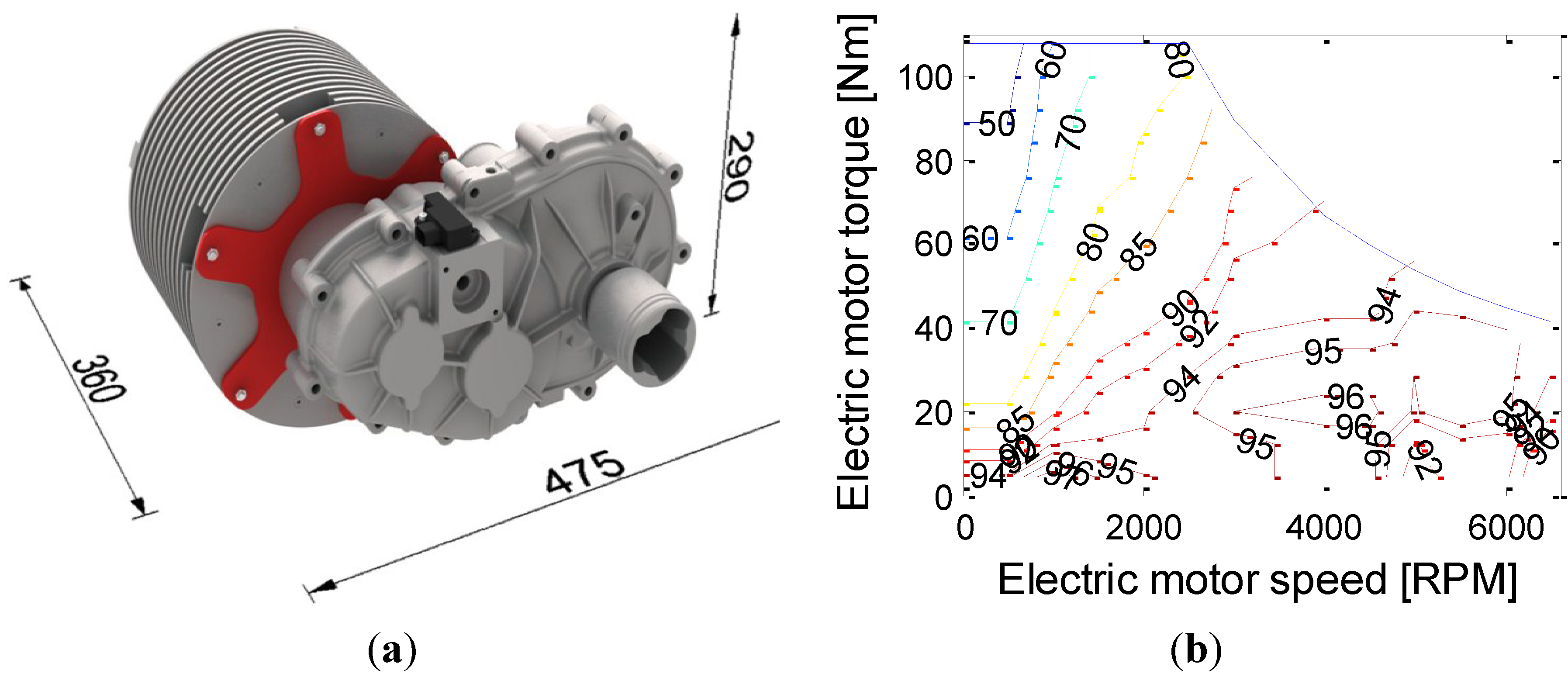
2.1. Electric Motor and Inverter Model

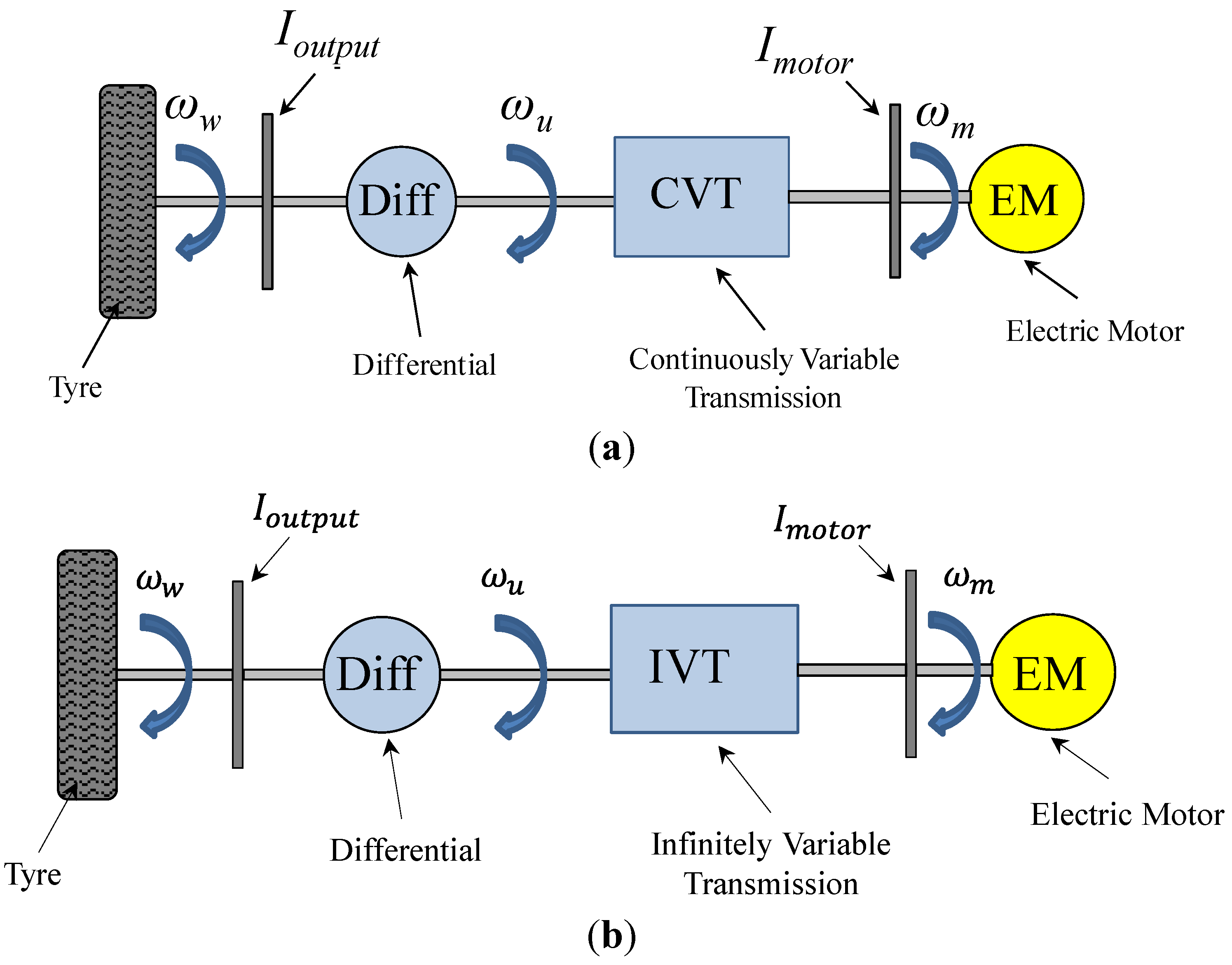
2.2. Transmission Model

2.2.1. 1G and 2G Transmissions
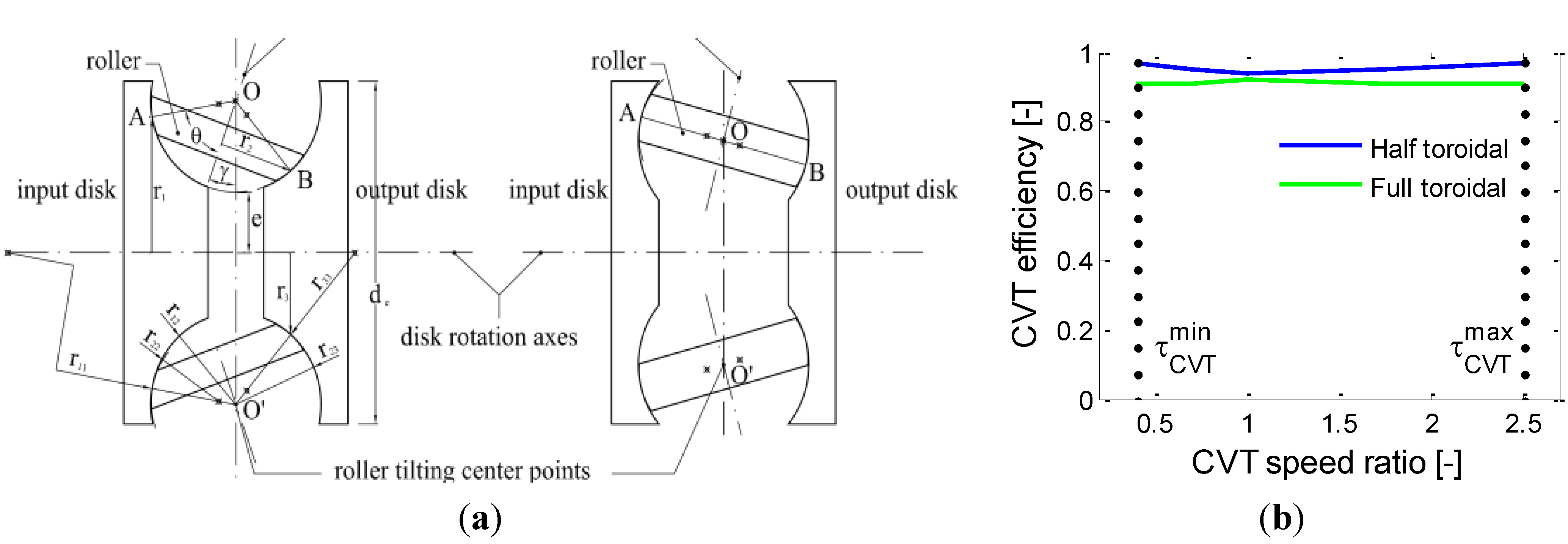
2.2.2. HT and FT CVTs

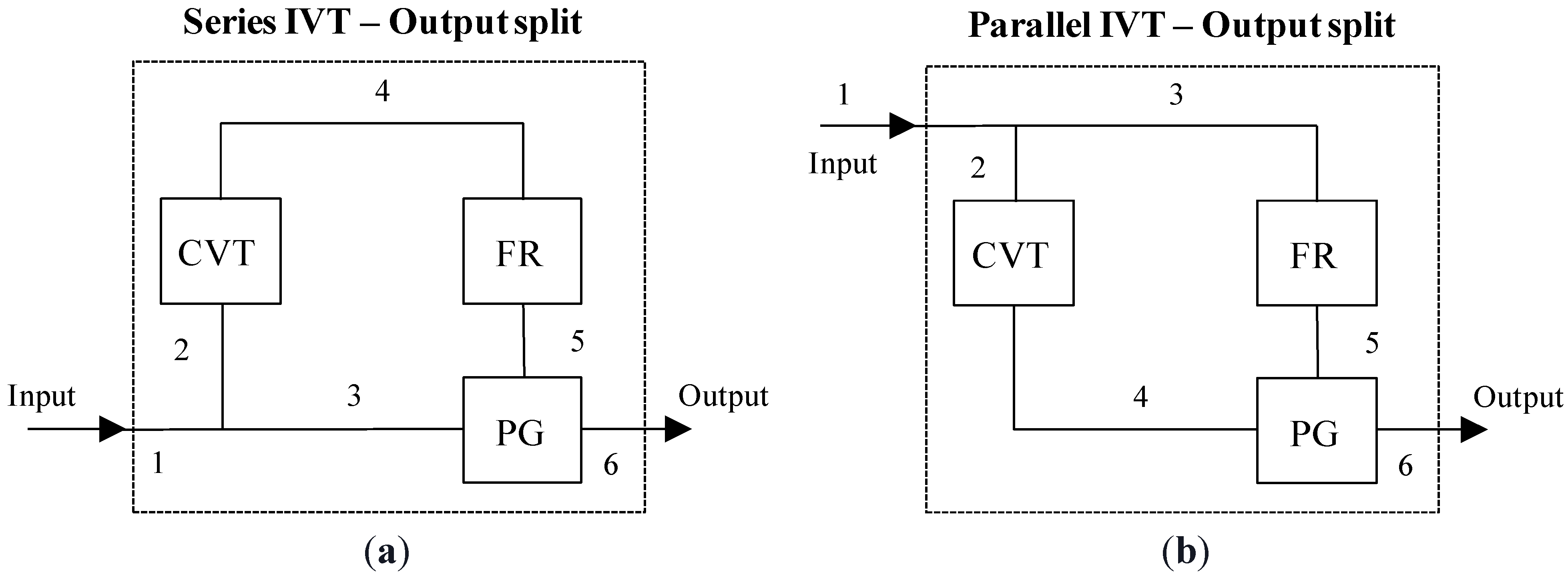
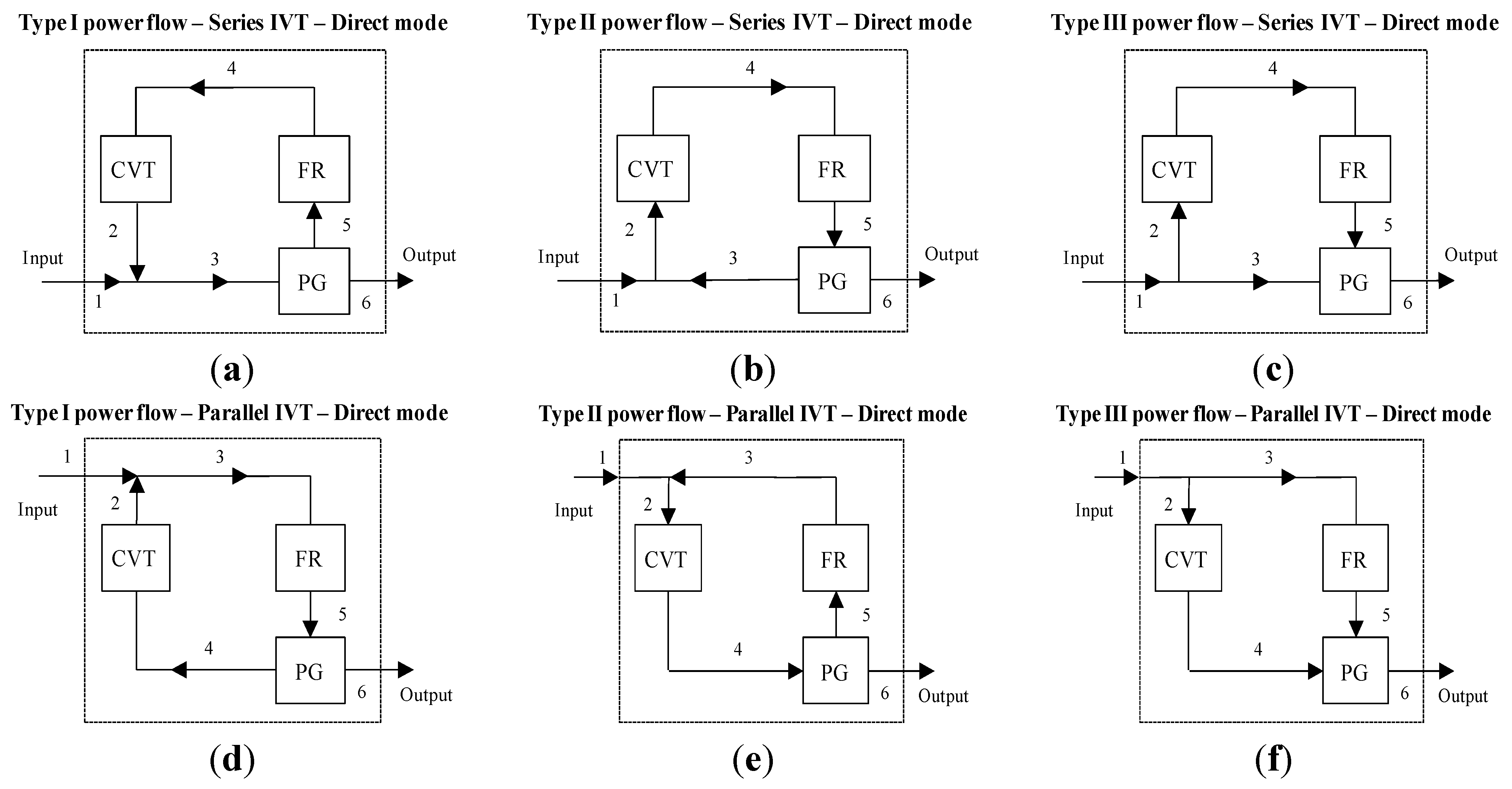
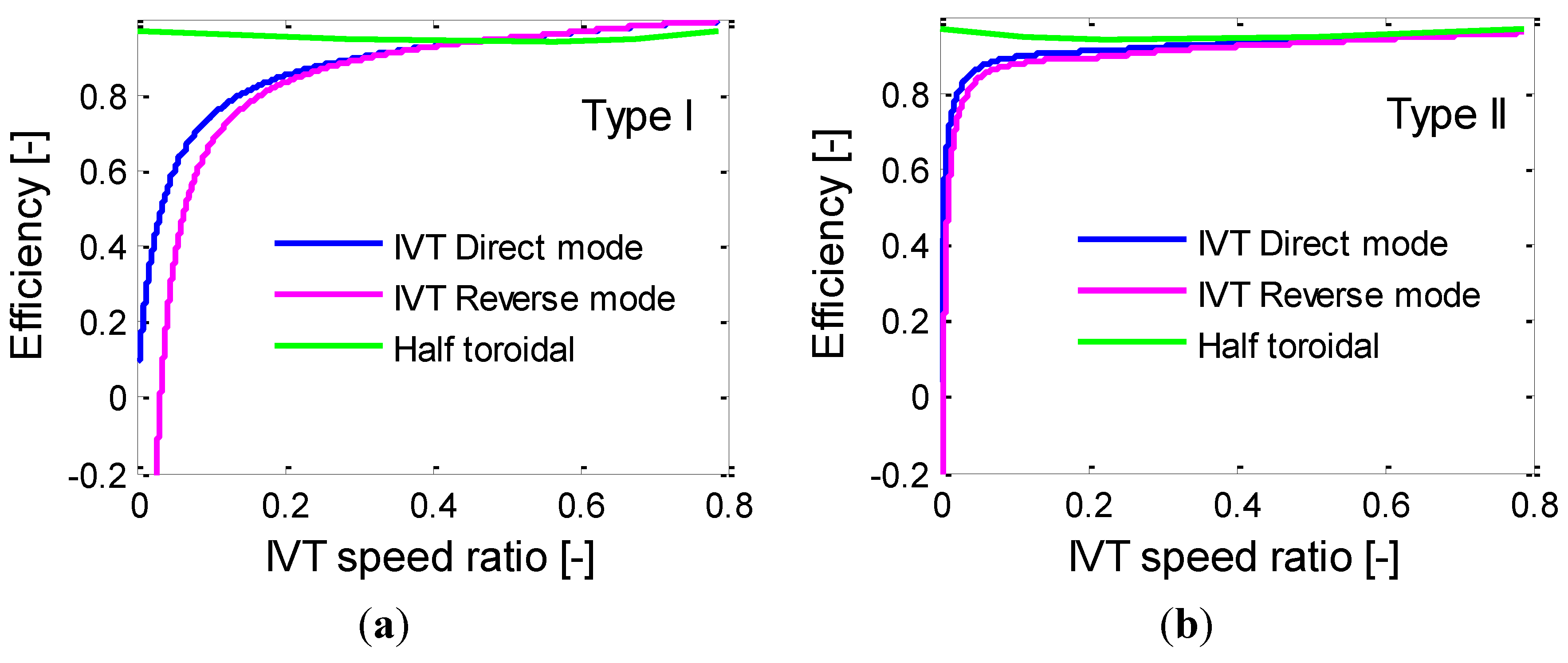
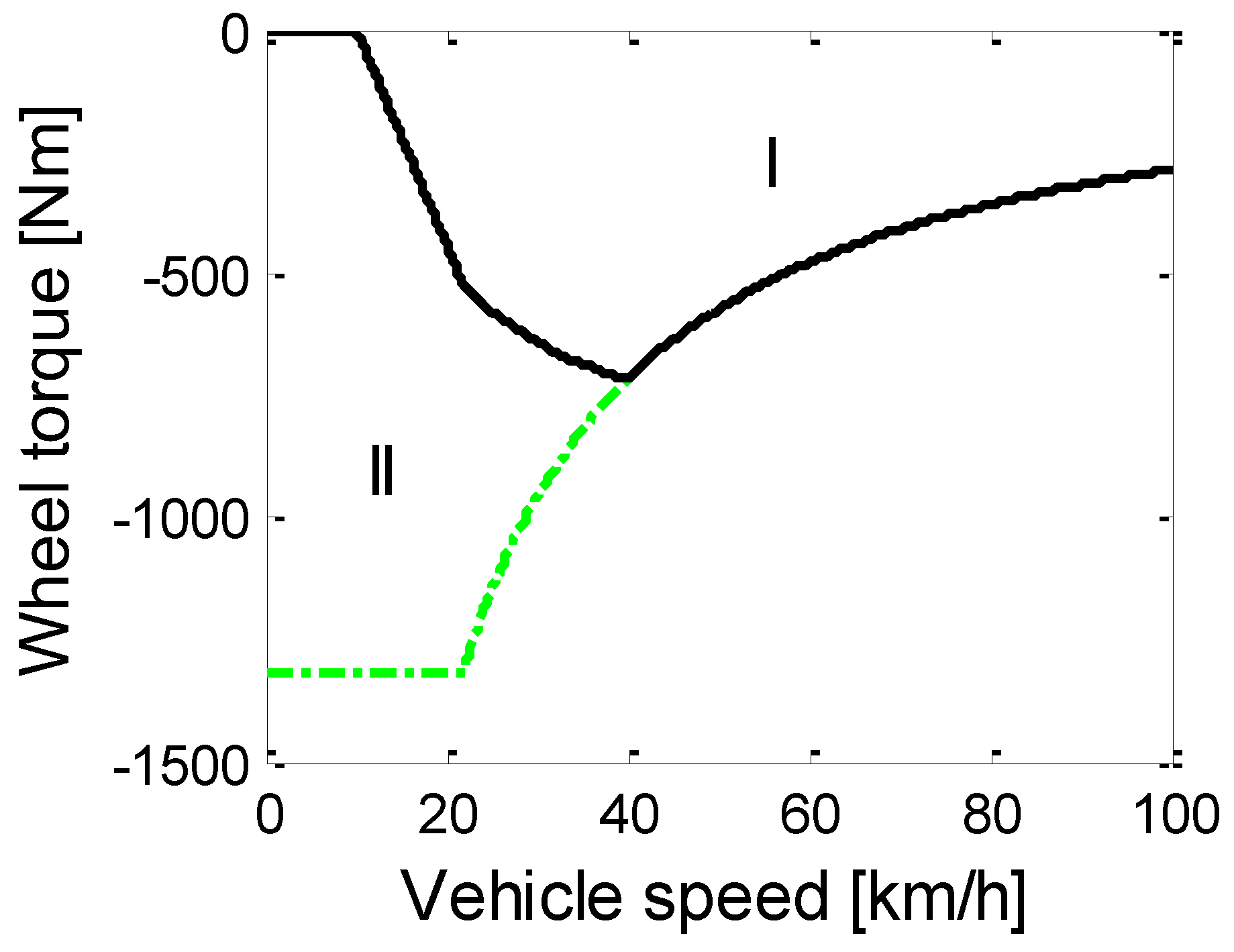
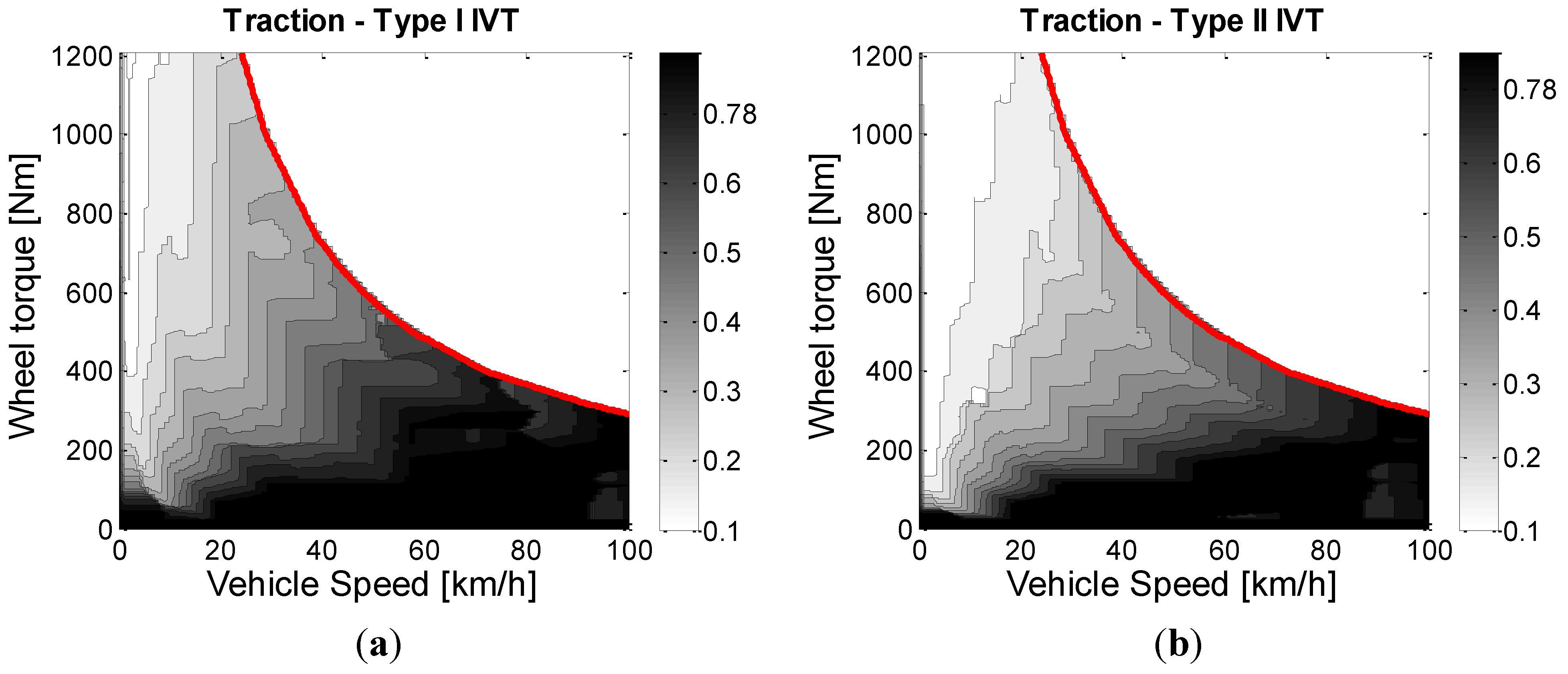
2.2.3. IVTs

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

| Architecture | Planetary Gear Ratio τPG | Fixed Ratio Drive Ratio τFR | Power Flow |
|---|---|---|---|
| Series IVT | 0.938 | −6.03 | Type I |
| Parallel IVT | 0.3753 | −0.24 | Type II |

2.3. Vehicle Model



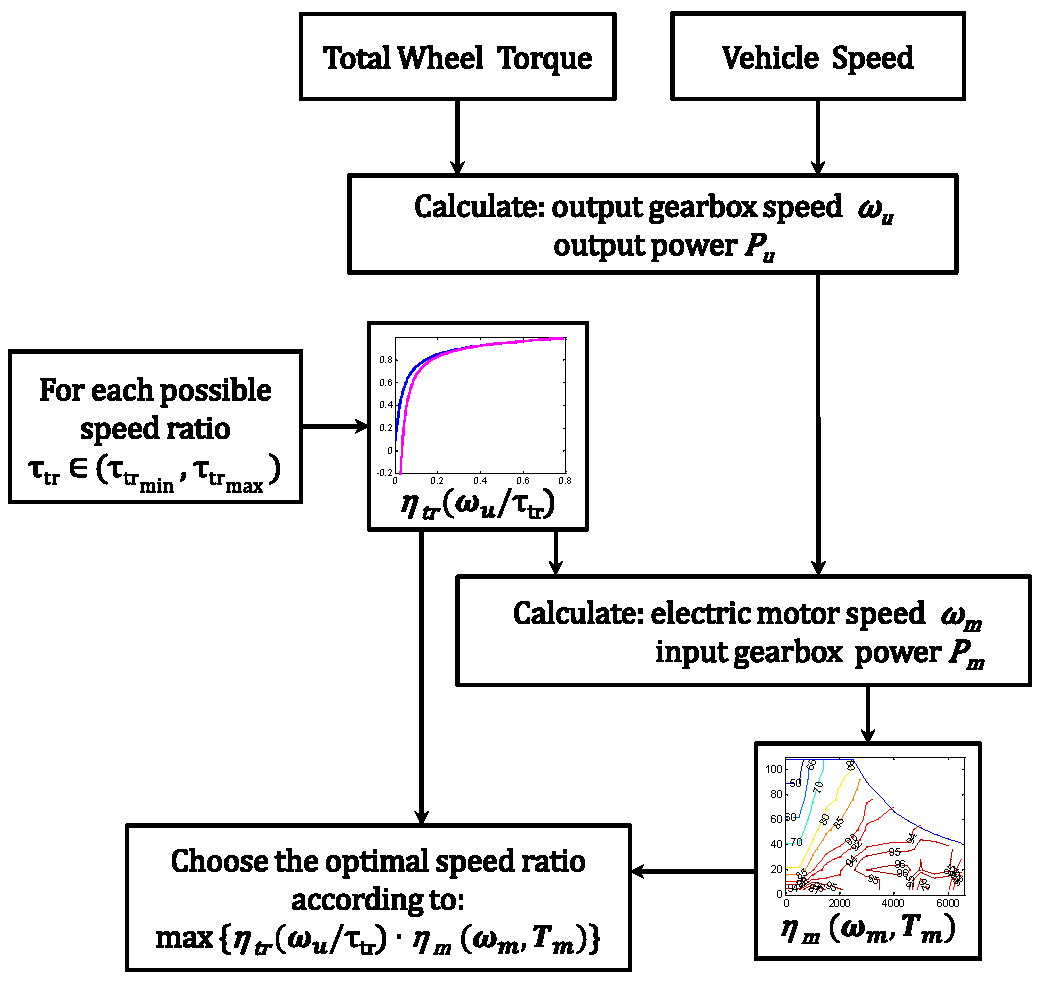
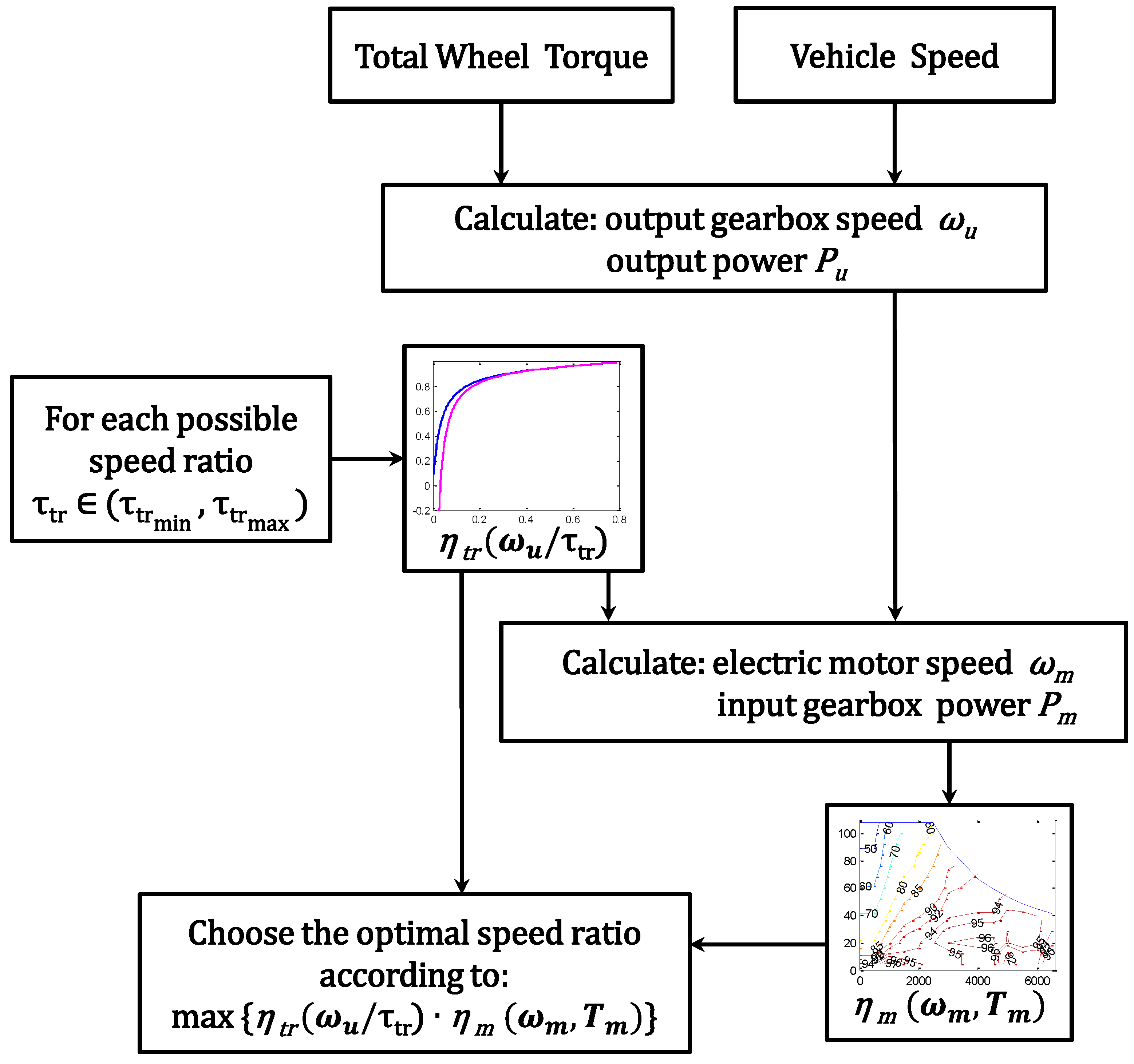
3. Optimization Procedure



4. Energy Consumption of a BEV at Constant Speed and in Driving Cycles
4.1. Constant Speed Energy Consumption

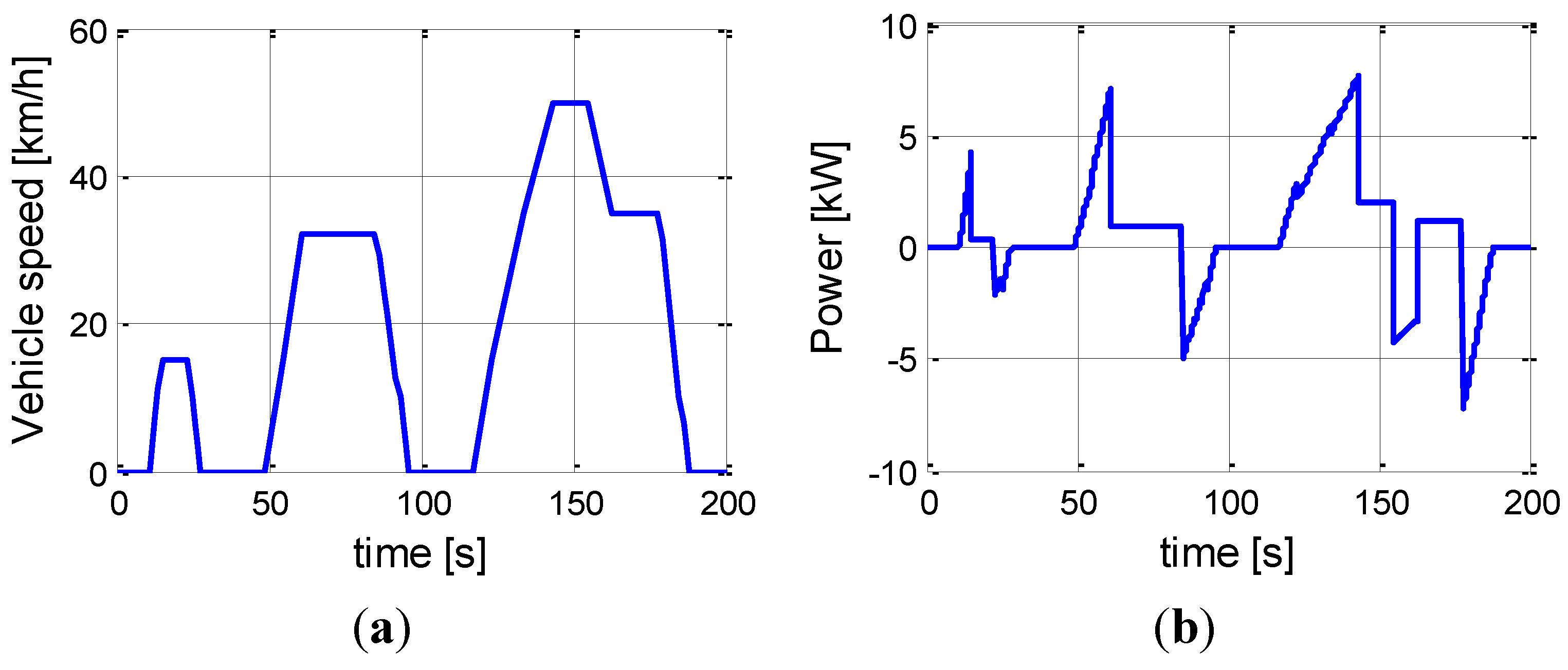
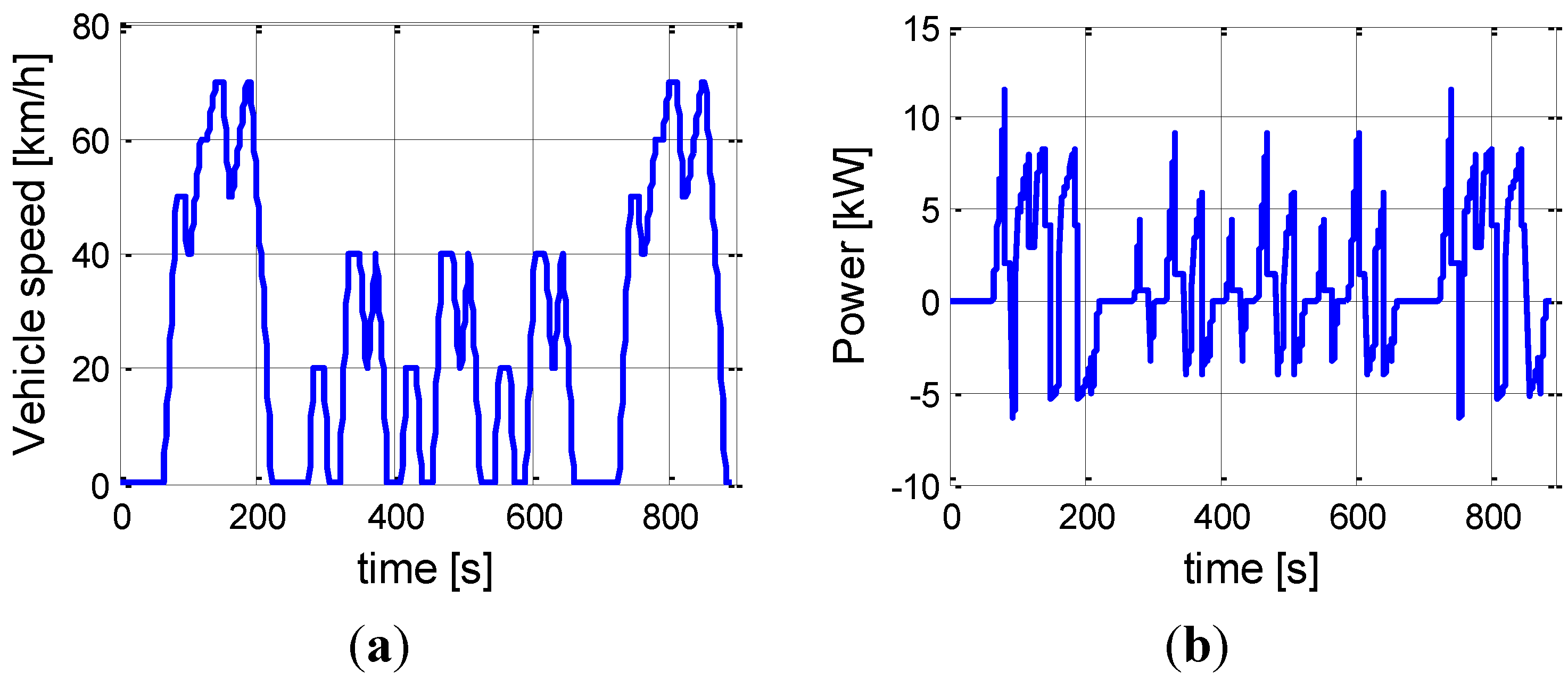
4.2. Energy Consumption along the UDC and Japanese 10-15 Driving Cycle


| Architectures | Traction [Wh] | Regeneration [Wh] | Total [Wh] | ∆% |
|---|---|---|---|---|
| Full Toroidal CVT (FT) | 281.4 | −79.6 | 206.0 | 10.4 |
| Half Toroidal CVT (HT) | 271.7 | −83.9 | 187.0 | 0.2 |
| Single-speed (1G) | 289.3 | −79.4 | 209.9 | 12.5 |
| Two-speed (2G) | 287.9 | −82.4 | 205.5 | 10.1 |
| IVT Type I (IVT-I) | 276.1 | −84.5 | 186.6 | 0 |
| IVT Type II (IVT-II) | 280.9 | −82.3 | 193.6 | 3.8 |
| Architectures | Traction [Wh] | Regeneration [Wh] | Total [Wh] | ∆% |
|---|---|---|---|---|
| Full Toroidal CVT (FT) | 508.19 | −135.44 | 372.75 | 12.9 |
| Half Toroidal CVT (HT) | 482.16 | −140.51 | 341.65 | 3.5 |
| Single-speed (1G) | 531.43 | −135.51 | 395.92 | 19.9 |
| Two-speed (2G) | 512.50 | −144.24 | 368.26 | 11.5 |
| IVT Type I (IVT-I) | 475.82 | −145.67 | 330.15 | 0 |
| IVT Type II (IVT-II) | 487.00 | −140.38 | 346.62 | 5.0 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tie, S.F.; Tan, C.W. A review of energy sources and energy management system in electric vehicles. Renew. Sustain. Energy Rev. 2013, 20, 82–102. [Google Scholar] [CrossRef]
- Miller, J. Propulsion Systems for Hybrid Vehicles; IET Power and Energy Series; The Institution of Engineering and Technology: Stevenage, UK, 2004. [Google Scholar]
- Husain, I. Electric and Hybrid Vehicles: Design Fundementals; CRC Press Taylor & Francis Group: London, UK, 2005. [Google Scholar]
- Ren, Q.; Crolla, D.A.; Morris, A. Effect of transmission design on electric vehicle (EV) performance. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC 09), Dearborn, MI, USA, 7–10 September 2009; pp. 1260–1265.
- Hutchinson, T.; Burgess, S.; Herrmann, G. Current hybrid-electric powertrain architectures: Applying empirical design data to life cycle assessment and whole-life cost analysis. Appl. Energy 2014, 119, 314–329. [Google Scholar] [CrossRef]
- Sorniotti, A.; Holdstock, T.; Pilone, G.L.; Viotto, F.; Bertolotto, S.; Everitt, M.; Barnes, R.J.; Stubbs, B.; Westby, M. Analysis and simulation of the gearshift methodology for a novel two-speed transmission system for electric powertrains with a central motor. J. Automob. Eng. 2012, 226, 915–929. [Google Scholar] [CrossRef]
- De Pinto, S.; Camocardi, P.; Sorniotti, A.; Mantriota, G.; Perlo, P.; Viotto, F. A four-wheel-drive fully electric vehicle layout with two-speed transmissions. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC ’14), Coimbra, Portugal, 27–30 October 2014.
- Hofman, T.; Dai, C.H. Energy efficiency analysis and comparison of transmission technologies for an electric vehicle. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference (VPPC), Lille, France, 1–3 September 2010; pp. 1–6.
- Derse, M.J. Forward-Looking Solutions for Transmissions in Electric Vehicles: Transmission Concepts for Electric Vehicles/Potentials from System and Component Perspective; Neumayer Tekfor Group: Offenburg, Germany, 2008. [Google Scholar]
- Zhu, B.; Zhang, N.; Walker, P.; Zhan, W.; Yueyuan, W.; Ke, N.; Zhou, X. Two Motor Two Speed Power-Train System Research of Pure Electric Vehicle; SAE Technical Paper 2013-01-1480; Society of Automotive Engineer (SAE): Warrendale, PA, USA, 2013. [Google Scholar]
- Zhu, B.; Zhang, N.; Walker, P.; Zhan, W.; Zhou, X.; Wei, Y.; Ke, N. Gear shift schedule design for multi-speed pure electric vehicles. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2014, 2014. [Google Scholar] [CrossRef]
- Yang, H.; Smith, A.; Swales, S.; Maguire, J. Development of two-mode hybrid powertrain with enhanced EV capability. SAE Int. J. Engines 2011, 4, 1058–1070. [Google Scholar]
- Sorniotti, A.; Subramanyan, S.; Turner, A.; Cavallino, C.; Viotto, F.; Bertolotto, S. Selection of the Optimal Gearbox Layout for an Electric Vehicle; SAE Technical Paper 2011-01-0946; Society of Automotive Engineer (SAE): Warrendale, PA, USA, 2011. [Google Scholar]
- Gunji, D.; Fujimoto, H. Efficiency analysis of powertrain with toroidal continuously variable transmission for electric vehicles. In Proceedings of the Industrial Electronics Society, IECON 2013, Vienna, Austria, 10–13 November 2013; pp. 6614–6619.
- Wicke, V.; Brace, C.J.; Deacon, M.; Vaughan, N.D. Preliminary Results from Driveability Investigations of Vehicles with Continuously Variable Transmissions. Available online: http://people.bath.ac.uk/enscjb/eindhoven_wicke1.pdf (accessed on 4 December 2014).
- Riderknecht, S.; Meier, T. Electric power train configurations and their transmissions systems. In Proceedings of the International Symposium on Power Electronics Electrical Drives Automation and Motion (SPEEDAM’10), Pisa, Italy, 14–16 June 2010; pp. 1564–1568.
- Meier, T.; Riderknecht, S.; Fietzek, R. Electric power train configurations with appropriate transmissions systems. In Proceedings of the SAE 2011 World Congress & Exhibition, Detroit, MI, USA, 12–14 April 2011.
- Gramling, J. Fully Integrated IVT-Regenerative Braking; SAE Technical Paper 2014-01-1727; Society of Automotive Engineer (SAE): Warrendale, PA, USA, 2014. [Google Scholar]
- Carbone, G.; Mangialardi, L.; Mantriota, G. Fuel Consumption of a Mid Class Vehicle with Infinitely Variable Transmission; SAE Technical Paper 2001-01-3692; Society of Automotive Engineer (SAE): Warrendale, PA, USA, 2001. [Google Scholar]
- Miller, J.M. Hybrid electric vehicle propulsion system architectures of the e-CVT type. IEEE Trans. Power Electron. 2006, 21, 756–767. [Google Scholar] [CrossRef]
- De Pinto, S.; Mantriota, G. A simple model for compound split transmissions. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2014, 228, 547–562. [Google Scholar] [CrossRef]
- Mangialardi, L.; Mantriota, G. Power flows and efficiency in infinitely variable transmissions. Mech. Mach. Theory 1999, 34, 973–994. [Google Scholar] [CrossRef]
- Mantriota, G. Power split continuously variable transmission systems with high efficiency. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2001, 215, 357–368. [Google Scholar] [CrossRef]
- Mantriota, G. Performances of a parallel infinitely variable transmission with a type II power flow. Mech. Mach. Theory 2002, 37, 555–578. [Google Scholar] [CrossRef]
- Mantriota, G. Performances of a series infinitely variable transmission with a type I power flow. Mech. Mach. Theory 2002, 37, 579–597. [Google Scholar] [CrossRef]
- Bottiglione, F.; de Pinto, S.; Mantriota, G. Infinitely variable transmissions in neutral gear: Torque ratio and power re-circulation. Mech. Mach. Theory 2014, 74, 285–298. [Google Scholar] [CrossRef]
- Bottiglione, F.; Mantriota, G. MG-IVT: An infinitely variable transmission with optimal power flows. J. Mech. Des. 2008, 130, 112603:1–112603:10. [Google Scholar] [CrossRef]
- Bottiglione, F.; Mantriota, G. Reversibility of power-split transmissions. J. Mech. Des. 2011, 133, 084503:1–084503:5. [Google Scholar] [CrossRef]
- Bottiglione, F.; Mantriota, G. Effect of the ratio spread of CVU in automotive kinetic energy recovery systems. J. Mech. Des. 2013, 135, 061001:1–061001:9. [Google Scholar] [CrossRef]
- Holdstock, T.; Sorniotti, A.; Everitt, M.; Fracchia, M.; Bologna, S.; Bertolotto, S. Energy consumption analysis of a novel four-speed dual motor drivetrain for electric vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Seoul Olympic Parktel, Seoul, Korea, 9–12 October 2012.
- Sorniotti, A.; Boscolo, M.; Turner, A.; Cavallino, C. Optimization of a multi-speed electric axle as a function of the electric motor properties. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010.
- Sorniotti, A.; Holdstock, T.; Everitt, M.; Fracchia, M.; Viotto, F.; Cavallino, C.; Bertolotto, S. A novel clutchless multiple–speed transmission for electric axles. Int. J. Powertrains 2013, 2, 103–131. [Google Scholar] [CrossRef]
- Bottiglione, F.; de Pinto, S.; Mantriota, G. A simple approach for hybrid transmission efficiency. In Proceedings of the 7th WSEAS International Conference of Energy & Environment, Kos, Greece, 14–17 July 2012.
- MOBY, Workpackage. Available online: http://www.moby-ev.eu/plusmoby (accessed on 4 December 2014).
- Carbone, G.; Mangialardi, L.; Mantriota, G. A comparison between the performance of full and half toroidal traction drives. Mech. Mach. Theory 2004, 39, 921–942. [Google Scholar] [CrossRef]
- Shinojima, T.; Toyoda, T.; Miyata, S.; Imanishi, T.; Inoue, E.; Machida, H. Development of the next-generation half-toroidal CVT with geared neutral and power-split systems for 450 Nm engines. In Proceedings of the International Continuously Variable and Hybrid Transmission Congress, Davis, CA, USA, 23–25 September 2004; pp. 46–54.
- Toyoda, T. Fuel economy improvement items with toroidal continuously variable transmission. In Proceedings of the 2010 CVT-Hybrid International Conference, Maastricht, The Netherlands, 17–19 November 2010; pp. 67–72.
- Bottiglione, F.; Carbone, G.; de Novellis, L.; Mangialardi, L.; Mantriota, G. Mechanical hybrid KERS based on toroidal traction drives: An example of smart tribological design improve terrestrial vehicle performance. Adv. Tribol. 2013, 2013, 918387:1–918387:9. [Google Scholar] [CrossRef]
- Carbone, G.; Mangialardi, L.; Mantriota, G. Influence of clearance between plates in metal pushing V-belt dynamics. J. Mech. Des. 2002, 124, 543–557. [Google Scholar] [CrossRef]
- Silva, C.; Ross, M.; Farias, T. Evaluation of energy consumption, emissions and cost of plug-in hybrid vehicles. Energy Convers. Manag. 2009, 50, 1635–1643. [Google Scholar]
- Silva, C.; Ross, M.; Farias, T. Analysis and simulation of “low-cost” strategies to reduce fuel consumption and emissions in conventional gasoline light-duty vehicles. Energy Convers. Manag. 2009, 50, 215–222. [Google Scholar] [CrossRef]
- Gao, L.; Liu, S.; Dougal, R. Dynamic lithium-ion battery model for system simulation. IEEE Trans. Compon. Packag. Technol. 2002, 25, 495–505. [Google Scholar] [CrossRef]
- Frank, A.A. Engine optimization concepts for CVT-hybrid systems to obtain the best performance and fuel efficiency. In Proceedings of the International Continuously Variable and Hybrid Transmission Congress, Davis, CA, USA, 23–25 September 2004.
- Ribau, P.; Silva, C.; Sousa, J. Efficiency, cost and life cycle CO2 optimization of fuel cell hybrid and plug-in hybrid urban buses. J. Appl. Energy 2014, 129, 320–335. [Google Scholar]
- Karbowski, D.; Kwon, J.; Kim, N.; Rousseau, A. Instantaneously Optimized Controller for a Multimode Hybrid Electric Vehicle; SAE Technical Paper 2010-01-0816; Society of Automotive Engineer (SAE): Warrendale, PA, USA, 2010. [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bottiglione, F.; De Pinto, S.; Mantriota, G.; Sorniotti, A. Energy Consumption of a Battery Electric Vehicle with Infinitely Variable Transmission. Energies 2014, 7, 8317-8337. https://doi.org/10.3390/en7128317
Bottiglione F, De Pinto S, Mantriota G, Sorniotti A. Energy Consumption of a Battery Electric Vehicle with Infinitely Variable Transmission. Energies. 2014; 7(12):8317-8337. https://doi.org/10.3390/en7128317
Chicago/Turabian StyleBottiglione, Francesco, Stefano De Pinto, Giacomo Mantriota, and Aldo Sorniotti. 2014. "Energy Consumption of a Battery Electric Vehicle with Infinitely Variable Transmission" Energies 7, no. 12: 8317-8337. https://doi.org/10.3390/en7128317