Joint Formation Control with Obstacle Avoidance of Towfish and Multiple Autonomous Underwater Vehicles Based on Graph Theory and the Null-Space-Based Method

Abstract
:1. Introduction
2. Mathematical Model of Towfish and AUV
- Assumption 1: The velocities and input forces are bounded as , , , , and with known , , , , and .
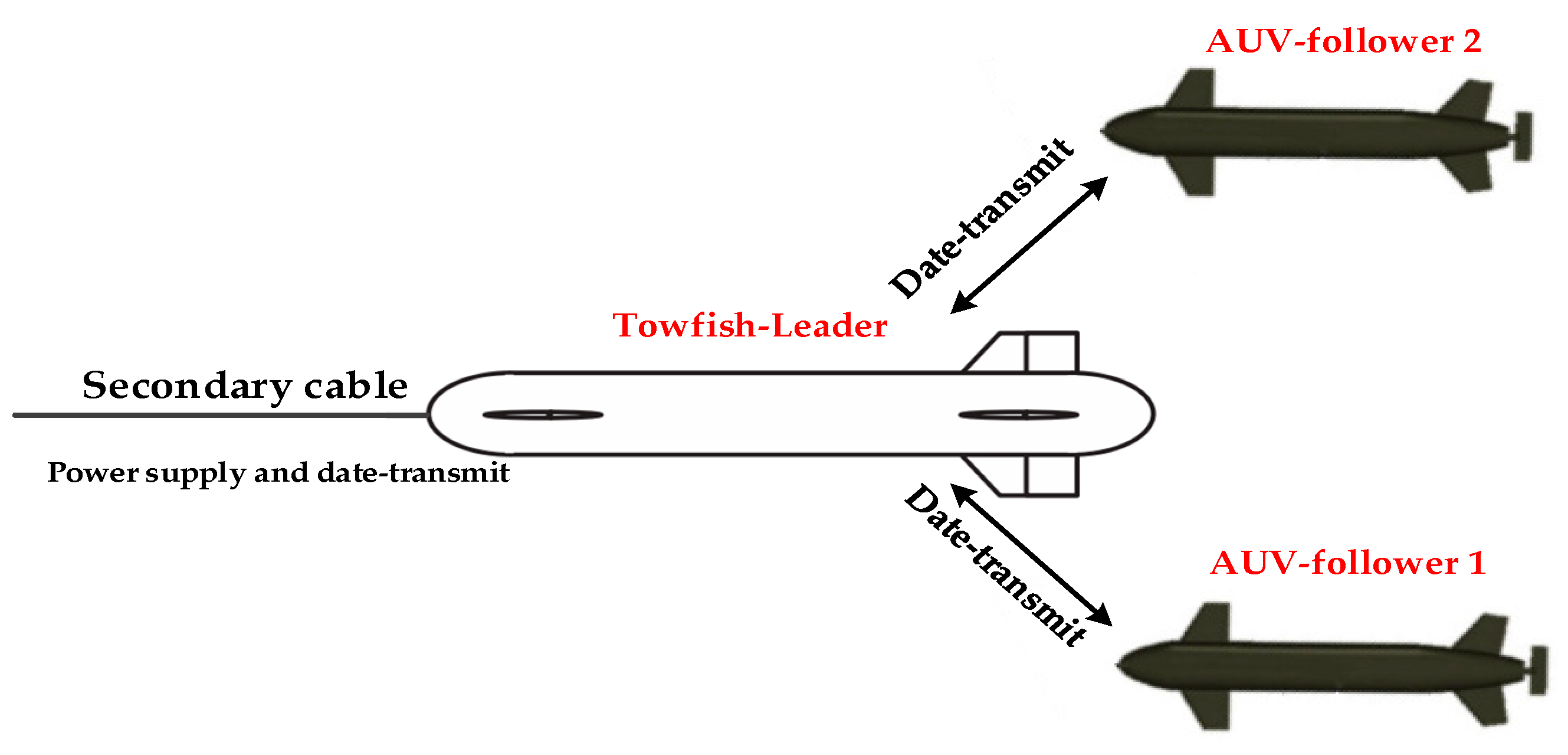
- Assumption 2: The vehicle can timely transmit a minimal amount of information, including orientation, velocity, and certain sensor data between each other in a short distance (the largest distance is no more than 6 m in this study).
- Assumption 3: Each vehicle can obtain its own orientation and velocity information accurately and in real time from the onboard sensors. No disturbances and obstacles are considered in this formation system.
3. Controller Design
3.1. Formation Control Based on Graph Theory
3.1.1. Passivity-Based Design Procedure
3.1.2. Design Criteria for the Feedback
3.2. NSB Method for Formation Obstacle Avoidance
3.2.1. Introduction to NSB
3.2.2. Tasks for Obstacle Avoidance
3.3. Formation Controller Design with Obstacle Avoidance Function
3.3.1. Control Scheme Based on NSB Strategy
3.3.2. Stability Analysis
4. Simulation and Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Meaning | Symbols | Meaning |
|---|---|---|---|
| surge | Control variable | ||
| sway | Jacobian matrix | ||
| yaw | gain matrix | ||
| target set | desired value | ||
| Incidence matrix | desired velocity |
Appendix B
References
- Yan, Z.P.; Liu, Y.B.; Yu, C.B.; Zhou, J.J. Leader-following coordination of multiple UUVs formation under two independent topologies and time-varying delays. J. Cent. South Univ. 2017, 24, 382–393. [Google Scholar] [CrossRef]
- Rout, R.; Subudhi, B. A backstepping approach for the formation control of multiple autonomous underwater vehicles using a leader–follower strategy. J. Mar. Eng. Technol. 2016, 15, 38–46. [Google Scholar] [CrossRef]
- Shojaei, K.; Dolatshahi, M. Line-of-sight target tracking control of underactuated autonomous underwater vehicles. Ocean Eng. 2017, 133, 244–252. [Google Scholar] [CrossRef]
- Minowa, A.; Toda, M. A High-Gain Observer-Based Approach to Robust Motion Control of Towed Underwater Vehicles. IEEE J. Ocean. Eng. 2018, 1–14. [Google Scholar] [CrossRef]
- Cammarata, A.; Sinatra, R. Parametric Study for the Steady-State Equilibrium of a Towfish. J. Intell. Robot. Syst. 2016, 81, 231–240. [Google Scholar] [CrossRef]
- Zhu, Y.J.; Zhu, K.Q.; Yang, B.K.; Wang, Z.B.; Qin, D.W.; Zeng, F.; Zhang, H.Y.; Xia, F. Dynamics modeling and emulation technique of the marine cable considering tension and compression bending torsion deformation. Ocean Eng. 2014, 32, 112–116. [Google Scholar]
- Wu, J.; Jin, X.; Chen, J.; Lu, L.; Xu, Y.; Chen, Y. Experimental observation on a controllable underwater towed vehicle with vertical airfoil main body. In Proceedings of the Asme International Conference on Ocean, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Yuan, Z.; Jin, L.; Chi, W.; Tian, H. Finite difference method for solving the nonlinear dynamic equation of underwater towed system. Int. J. Comput. Methods 2014, 11, 1350060. [Google Scholar] [CrossRef]
- Miller, L.G.; Ellenrieder, K.D.V. Modeling and simulation of an AUV-towfish system. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–9. [Google Scholar]
- Lalu, P.; Narayanan, K. Numerical Simulation of Two-Part Underwater Towing System. Ph.D. Thesis, Cochin University of Science And Technology, Cochin, India, January 2013. [Google Scholar]
- Teixeira, F.C.; Aguiar, A.P.; Pascoal, A. Nonlinear adaptive control of an underwater towed vehicle. Ocean Eng. 2010, 37, 1193–1220. [Google Scholar] [CrossRef]
- Teixeira, F.C.; Aguiar, A.P.; Pascoal, A. Nonlinear adaptive depth tracking and attitude control of an underwater towed vehicle. IFAC Proc. Vol. 2009, 42, 211–216. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Chwang, A.T. Experimental investigation on a two-part underwater towed system. Ocean Eng. 2001, 28, 735–750. [Google Scholar] [CrossRef]
- Wu, J.; Chwang, A.T. Investigation on a two-part underwater manoeuvrable towed system. Ocean Eng. 2001, 28, 1079–1096. [Google Scholar] [CrossRef]
- Pang, S.K.; Liu, J.Y.; Wang, J.; Li, Y.H.; Yi, H. Motion characteristics of two-part towed system during towing ship turning maneuvers. Ship Eng. 2017, 39, 71–77. [Google Scholar]
- Rosales, C.; Leica, P.; Sarcinelli-Filho, M.; Scaglia, G.; Carelli, R. 3D Formation Control of Autonomous Vehicles Based on Null-Space. J. Intell. Robot. Syst. 2016, 84, 453–467. [Google Scholar] [CrossRef]
- Gao, Q.; Pang, Y.; Lv, D.H. Simulation on behavior-based formation control of multi-robot. Autom. Instrum. 2012, 8, 5. [Google Scholar]
- Sun, L.X. Uavs Formation Based on Self-Organizing Behavior. Master’s Thesis, Harbin University of Technology, Harbin, China, December 2017. [Google Scholar]
- Arrichiello, F.; Chiaverini, S.; Fossen, T.I. Formation Control of Marine Surface Vessels Using the Null-Space-Based Behavioral Control. Group Coordination and Cooperative Control; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1–19. [Google Scholar]
- Falin, W.; Jiemin, C.; Yuan, L. Leader-Follower Formation Control for Quadrotors. IOP Conf. Ser. Mater. Sci. Eng. 2017, 187, 012016. [Google Scholar] [Green Version]
- Wu, Y.; Meng, X.; Xie, L.; Lu, R.; Su, H.; Wu, Z.G. An input-based triggering approach to leader-following problems. Automatica 2017, 75, 221–228. [Google Scholar] [CrossRef]
- Zhao, R.; Xiang, X.; Yu, C.; Jiang, Z. Coordinated formation control of autonomous underwater vehicles based on leader-follower strategy. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–5. [Google Scholar]
- Lai, Y.H.; Li, R.; Shi, J.Y.; He, L. On the study of a multi-quadrotor formation control with triangular structure based on Graph theory. Control Theory Appl. 2018, 35, 1530–1537. [Google Scholar]
- Li, G.N. Research on Multi-AUVs Formation Control Based on Graph Theory. Master’s Thesis, Shenyang Ligong Universtiy, Shenyang, China, March 2015. [Google Scholar]
- Zhang, J.; Li, X.; Li, R. Multi-Body Dynamics Modeling and Simulation Analysis of a Vehicle Suspension Based on Graph Theory. J. Beijing Inst. Technol. 2018, 27, 518–526. [Google Scholar]
- Liu, C.; Fan, S.; Li, B.; Chen, S.; Xu, Y.; Xu, W. Path planning for autonomous underwater vehicle docking in stationary obstacle environment. In Proceedings of the OCEANS 2016—Shanghai, Shanghai, China, 11–13 April 2016; pp. 1–5. [Google Scholar]
- Pan, W.W.; Jiang, D.P.; Pang, Y.J.; Li, Y.M.; Zhang, Q. A multi-AUV formation algorithm combing artificial potential field and virtual structure. Acta Armamentarii 2017, 38, 326–334. [Google Scholar]
- Roth, Y.; Alessandretti, A.; Aguiar, P.A.; Jones, C. A virtual vehicle approach to distributed control for formation keeping of underactuated vehicles. In Proceedings of the Indian Control Conference, Chennai, India, 4–6 January 2015. [Google Scholar]
- Xiang, X.B. Research on Path Following and Coordinate Control for Second-Order Nonholonomic AUVs. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, June 2010. [Google Scholar]
- Ding, J.R.; Du, C.P.; Zhao, Y.; Yin, D.Y. Path planing algorithm for unmanned aerial vehicles based on improved artificial potential fied. J. Comput. Appl. 2016, 36, 287–290. [Google Scholar]
- Zhao, Y.; Jiao, L.; Zhou, R.; Zhang, J. UAV formation control with obstacle avoidance using improved artificial potential fields. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 6219–6224. [Google Scholar]
- Liu, Y.; Huang, P.F.; Zhang, Z.Y. Distributed Formation Control Using Artificial Potentials and Neural Network for Constrained Multiagent Systems. IEEE Trans. Control Syst. Technol. 2018, 99, 1–8. [Google Scholar] [CrossRef]
- Shojafar, M.; Abawajy, J.H.; Delkhah, Z.; Ahmadi, A.; Pooranian, Z.; Abraham, A. An efficient and distributed file search in unstructured peer-to-peer networks. Peer Peer Netw. Appl. 2015, 8, 120–136. [Google Scholar] [CrossRef]
- Ahmadi, A.; Shojafar, M.; Hajeforosh, S.F.; Dehghan, M.; Singhal, M. An efficient routing algorithm to preserve k-coverage in wireless sensor networs. J. Supercomput. 2014, 68, 599–623. [Google Scholar] [CrossRef]
- Arrichiello, F. Coordination Control of Multiple Mobile Robots. Ph.D. Thesis, University of Cassino, Cassino, Italy, November 2006. [Google Scholar]
- Xu, P. Behavior-Based Formation Control of Multi-AUV. Master’s Thesis, Shanghai Jiaotong University, Shanghai, China, February 2013. [Google Scholar]
- Gan, W.Y.; Zhu, D.Q. Complete coverage belief function path planning algorithm of autonomous underwater vehicle based on behavior strategy. J. Syst. Simul. 2018, 30, 1857–1868. [Google Scholar]
- Wu, L.X.; Wu, S.K.; Sun, H.; Zheng, J. Mobile robot path planning based on multi-behaviours. Control Decis. 2018, 1–6. [Google Scholar] [CrossRef]
- Gao, J.; Li, Y.Q.; Xu, D.M.; Yan, W.S. Behavior-based collision free path following control of an autonomous underwater vehicles. J. Dalian Marit. Univ. 2012, 38, 30–34. [Google Scholar]
- Wu, L.B.; Wang, K.X.; Zhang, H.; Zheng, Z.Q. A null-space-based control method for soccer robot. Comput. Eng. Sci. 2011, 33, 145–150. [Google Scholar]
- Wu, L.B. Multi-Robots Formation Control Based on Null-Space-Based Method. Master’s Thesis, National Universtiy of Defense Technology, Changsha, China, January 2010. [Google Scholar]
- Sørbø, E.H. Vehicle Collision Avoidance System. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, June 2013. [Google Scholar]
- Sun, B.; Zhu, D.Q. Three dimensional D* Lite path planning for Autonomous Underwater Vehicle under partly unknown environment. In Proceedings of the 2016 12th World Congress on Intelligent Control and Automation (Wcica), Guilin, China, 12–15 June 2016; pp. 3248–3252. [Google Scholar]
- Zhu, D.Q.; Du, Q. Three-dimensional formation control method for AUV based on pilot location information. Syst. Simul. Technol. 2013, 9, 193–198. [Google Scholar]
- Xu, P.F. Reserch on System Design and Key Technology of ARV with Full Ocean Depth. Ph.D. Thesis, China Ship Scientific Research Center, Wuxi, China, March 2014. [Google Scholar]
- Wang, F. Simulation and Control Research of Marine Towed Seismic System. Ph.D. Thesis, Shanghai Jiaotong Universtiy, Shanghai, China, October 2007. [Google Scholar]
- Do KDPan, J. Control of Ships and Underwater Vehicles: Design for Underactuated and Nonlinear Marine Systems, 1st ed.; Springer Science & Business Media: New York, NY, USA, 2009. [Google Scholar]
- Fossen, T.I. Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles, Marine Cybernetics, 1st ed.; Tapir Trykkeri: Trondheim, Norway, 2002. [Google Scholar]
- He, B.; Arcak, M.; Wen, J. Cooperative Control Design: A Systematic, Passivity-Based Approach, 1st ed.; Springer Science & Business Media: New York, NY, USA, 2011. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]














© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, S.-k.; Li, Y.-h.; Yi, H. Joint Formation Control with Obstacle Avoidance of Towfish and Multiple Autonomous Underwater Vehicles Based on Graph Theory and the Null-Space-Based Method. Sensors 2019, 19, 2591. https://doi.org/10.3390/s19112591
Pang S-k, Li Y-h, Yi H. Joint Formation Control with Obstacle Avoidance of Towfish and Multiple Autonomous Underwater Vehicles Based on Graph Theory and the Null-Space-Based Method. Sensors. 2019; 19(11):2591. https://doi.org/10.3390/s19112591
Chicago/Turabian StylePang, Shi-kun, Ying-hui Li, and Hong Yi. 2019. "Joint Formation Control with Obstacle Avoidance of Towfish and Multiple Autonomous Underwater Vehicles Based on Graph Theory and the Null-Space-Based Method" Sensors 19, no. 11: 2591. https://doi.org/10.3390/s19112591