
Abstract
Experiments by Fabre (1915), Thorpe (1950), Chmurzynski (1964), and most recently Gould (1986) suggest that insects have “maps” of their terrain which enable them to find their way directly to a goal when they are displaced several hundred metres from it. This paper discusses what might constitute an insect's map in terms of a two-part computational model. The first part describes how an insect reaches a goal when the insect is sufficiently close that it can see some of the landmarks which are visible from the goal. The second part considers the problem of navigating when there is no similarity between the view from the release-site and the view from the goal.
We start from a model designed to explain how a bee might return to a goal using a two-dimensional “snapshot” of the landscape seen from the goal (Collett and Cartwright 1983). To guide its return, the model bee continuously compares its snapshot with its current retinal image and moves so as to reduce the discrepancy between the two. Bees can only be guided in the right direction by the difference between current retinal image and snapshot when there is some resemblance between the two. In a realistically cluttered world, snapshot and retinal image become very dis-similar only a short distance from the goal.
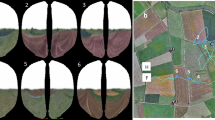
To increase the distance from which a model bee can return, the bee takes two snapshots at the goal. The first snapshot excludes landmarks near to the goal and the second snapshot includes them. With close landmarks filtered from both snapshot and retinal image, the match between the two deteriorates gradually as the bee moves away from the goal. A model bee using a filtered snapshot and image finds its way back to the neighbourhood of the goal from a relatively long distance (Fig. 2). The bee then switches to the second snapshot and is guided to the precise spot by its memory of the close landmarks.
For longer range guidance, the model bee is equipped with an album of snapshots, each taken at a different location within the terrain. Linked to each snapshot is a vector encoding the distance and direction from the place where the snapshot was taken to the hive. When the bee is displaced to a new position, it selects the snapshot which best matches its current image and follows the associated home-vector back to the hive (Fig. 3). Such a hive-centred map can also be used to devise novel routes to places other than the hive. For instance, a bee can reach a foraging site from anywhere in its terrain by adding the home-vector recalled at the starting position to a vector specifying the distance and direction of the foraging site from the hive. The sum of these two vectors defines a direct trajectory to the foraging site.
Similar content being viewed by others


References
Baerends GP (1941) Fortpflanzungsverhalten und Orientierung der Grabwespe Ammophila campestris. Tijdschr Entomol 84:68–275
Cartwright BA, Collett TS (1979) How honey-bees know their distance from a nearby landmark. J Exp Biol 82:367–372
Cartwright BA, Collett TS (1983) Landmark learning in bees: experiments and models. J Comp Physiol 151:521–543
Cheng K, Collett TS, Pickhard A, Wehner R (1987) The use of visual landmarks by honeybees: bees weight landmarks according to their distance from the goal (in press)
Chmurzynski JA (1964) Studies on the stages of spatial orientation in female Bembex rostrata (Linne 1758) returning to their nests (Hymenoptera, Sphegidae). Acta Biol Exp (Warsaw) 24:103–132
Collett TS, Cartwright BA (1983) Eidetic images in insects: their role in navigation. Trends Neurosci 6:101–105
Fabre JH (1915) The hunting wasps. Hodder and Stoughton, Toronto London New York
Frisch K von (1967) The dance language and orientation of bees. Oxford University Press, Oxford
Fuller E, Kowalski U, Wiltschko R (1983) Orientation of homing pigeons: compass orientation vs piloting by familiar landmarks. J Comp Physiol 153:55–58
Gorner P, Claas B (1985) Homing behavior and orientation in the funnel-web spider, Agelena labyrinthica Clerck. In: Barth FG (ed) Neurobiology of arachnids. Springer, Berlin Heidelberg New York, pp 275–297
Gould JL (1986) The locale map of honey bees: do insects have cognitive maps. Science 232:861–863
Graue LC (1963) The effect of phase shifts in the day-night cycle on pigeon homing at distances of less than one mile. Ohio J Sci 63:214–217
Harkness RD, Wehner R (1977) Cataglyphis. Endeavour, N.S. 1:115–121
Lindauer M (1960) Time-compensated orientation in bees. Cold Spring Harbor Symp Q Biol 25:371–377
Mittelstaedt H (1985) Analytical cybernetics of spider navigation. In: Barth FG (ed) Neurobiology of arachnids. Springer, Berlin Heidelberg New York, pp 298–316
Thorpe WH (1950) A note on detour experiments with Ammophila pubescens. Curt Behav 13:257–263
Wallraff HG (1974) Das Navigationssystem der Vögel. Oldenbourg, München
Wehner R (1981) Spatial vision in arthropods. In: Autrum H (ed) Comparative physiology and evolution of vision in invertebrates. Springer, Berlin Heidelberg New York (Handbook of sensory physiology, vol V11 6C, pp 287–61)
Wehner R, Raeber F (1979) Visual spatial memory in desert ants, Cataglyphis bicolor (Hymenoptera: Formicidae). Experientia 35:1569–1571
Wehner R, Srinivasan MV (1981) Searching behaviour of desert ants, genus Cataglyphis (Formicidae, Hymenoptera). J Comp Physiol 142:315–338
Zeil J, Wittmann D (1987) Visual orientation towards the nest in a stingless bee (Tetragonisca angustula). In: Rembold H, Eder J (eds) Biology and chemistry of social insects. J Peperny, Munich (in press)
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Cartwright, B.A., Collett, T.S. Landmark maps for honeybees. Biol. Cybern. 57, 85–93 (1987). https://doi.org/10.1007/BF00318718
Received:
Issue Date:
DOI: https://doi.org/10.1007/BF00318718