1. Introduction
Global warming, the petroleum crisis, and legislation pushing for higher fuel economy and lower emissions, are leading to the development of electric vehicles (EVs) [
1,
2]. As the key component of any electric vehicle, the energy storage system attracts more and more attention. A variety of electrochemical energy storage devices are currently used in EV applications, such as lithium-ion (Li-ion) battery, nickel metal hydride (NiMH) battery, lead acid (LA) battery, and ultracapacitor (UC). Among them, Li-ion batteries are viewed as the most promising energy storage units for EVs, for its high energy density, high power density, low self-discharging rate, and long lifespan [
3,
4].
However, strict requirements should be satisfied when using Li-ion batteries, and a battery management system (BMS) is required to provide the functions of monitoring, estimation, and protection to ensure the safe operations of Li-ion batteries. The state of charge (SOC), acting the similar role as the fuel meter for the internal combustion engine system, is the most important factor for batteries which should be accurately estimated by the BMS. The battery SOC indicates the residual capacity of the battery system and has significant importance in predicting the remaining driving range of EVs. Besides, accurate SOC estimation can also prevent the batteries from over-charging and over-discharging conditions and thus can extend the battery cycle life [
5]. However, since the battery SOC cannot be directly measured and it is affected by many factors, such as current, temperature and battery age, estimation of the battery SOC is still a challenging problem that needs to be solved.
A number of SOC estimation methods have been proposed. Each method has its own advantages and limitations. Generally, these methods can be mainly classified into two kinds: (1) direct measurement based estimation and (2) model based estimation. The first kind of method directly uses the measurements from battery system to calculate the SOC, such as current integration method [
6], open circuit voltage (OCV) based method [
7]. The current integration method is easy to implement with low computation, but it suffers from the low estimation accuracy due to the accumulative errors caused by current sensor noises. In addition, it is also difficult to obtain the initial SOC when using the current integration method. Therefore, the open circuit voltage method is usually used complementarily with the current integration method to recalibrate the SOC and to provide the initial SOC. However, a long rest time of the tested battery is required to reach the open circuit voltage, which is usually unrealistic for real world applications.
In the second kind of method, the battery model is utilized when estimating the battery SOC. One of the model based methods for SOC estimation is based on the black-box battery models, such as neural networks (NN) [
8], fuzzy logic (FL) [
9], and support vector machine (SVM) [
10]. Eddahech
et al. [
8] developed a recurrent neural network as a SOC predictor that takes into account operational conditions, the results show that the predictor allows very precise SOC estimation. Salkind
et al. [
9] utilized the fuzzy logic to estimate the battery SOC by using the training datasets obtained by impedance spectroscopy and coulomb counting techniques. Anton
et al. introduced a support vector machine based SOC estimator for a high-capacity lithium iron manganese phosphate (LiFeMnPO
4) battery cell, using cell current, cell voltage, and cell temperature as independent variables. The results show that the SVM SOC estimator maintains a high level of accuracy. According to the literatures, the black-box model based methods can be quite accurate if sufficient experimental data is used to train the model. However, their performance highly depends on the quantity and quality of the training data set, a large amount of offline battery tests are necessary to obtain a good model which can be very time-consuming. Optimum state filtering method is another kind of model based method for battery SOC estimation. This method usually performs SOC estimation based on an equivalent circuit battery model [
11,
12]. Many different state filtering methods have been investigated, such as extended Kalman filter (EKF) [
13,
14,
15], sigma point Kalman filter (SPKF) [
16,
17,
18], adaptive extended Kalman filter (AEKF) [
19], adaptive unscented Kalman filter (AUKF) [
20], particle filter (PF) [
21] and others [
22,
23,
24,
25,
26]. Plett [
13,
14,
15,
16,
17] established the EKF and UKF based SOC estimation methods using different orders of equivalent circuit battery models for simultaneous state and parameters estimation of LiPB packs. Both of them obtained very good results, and the methods were robust to different initial states. Han
et al. adopt the AEKF method for SOC estimation by adaptively updating the process and measurement noise covariance which improved the estimation accuracy. Similarly, Hu
et al. applied the AUKF for SOC estimation. All of the Kalman filter (KF) based methods achieve very good estimation performance because of online state error correction capability. However, there are some shortcomings for KF based methods. For instance, the statistic distribution of the process noise is assumed to be the zero mean white Gaussian process and prior knowledge of the noise covariance should be known before estimating the battery SOC. In fact, it is difficult to obtain the accurate information of the process noises for real world applications, and the filter performance will decrease or even diverge with inaccurate noise information. Besides, the assumption of the zero-mean Gaussian process noises usually cannot be met in practice which can decrease the estimation accuracy [
27]. PF is another optimum state filtering methodology for SOC estimation [
21]. It is able to represent any probability density function for the state by using Monte Carlo sampling methods which improves the estimation accuracy. However, the computational effort is high for PF due to the large amount of particles which makes it difficult to apply for real-world applications.
In this paper, the nonlinear predictive filter (NPF) is proposed to estimate the SOC of Li-ion batteries and the proposed method is evaluated on the battery cells with different chemistries. The NPF method was firstly proposed by Crassidis
et al., for spacecraft attitude estimation and obtained satisfactory results [
28]. It is a nonlinear optimum state estimation method implemented on continuous-discrete time systems, which is particularly suitable for battery systems [
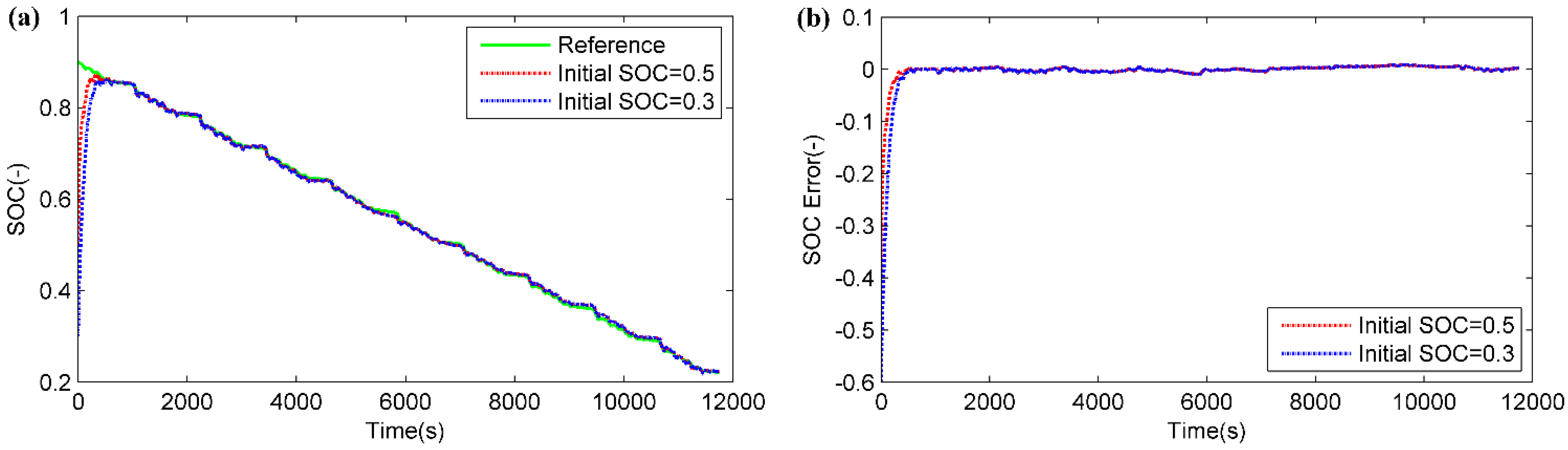
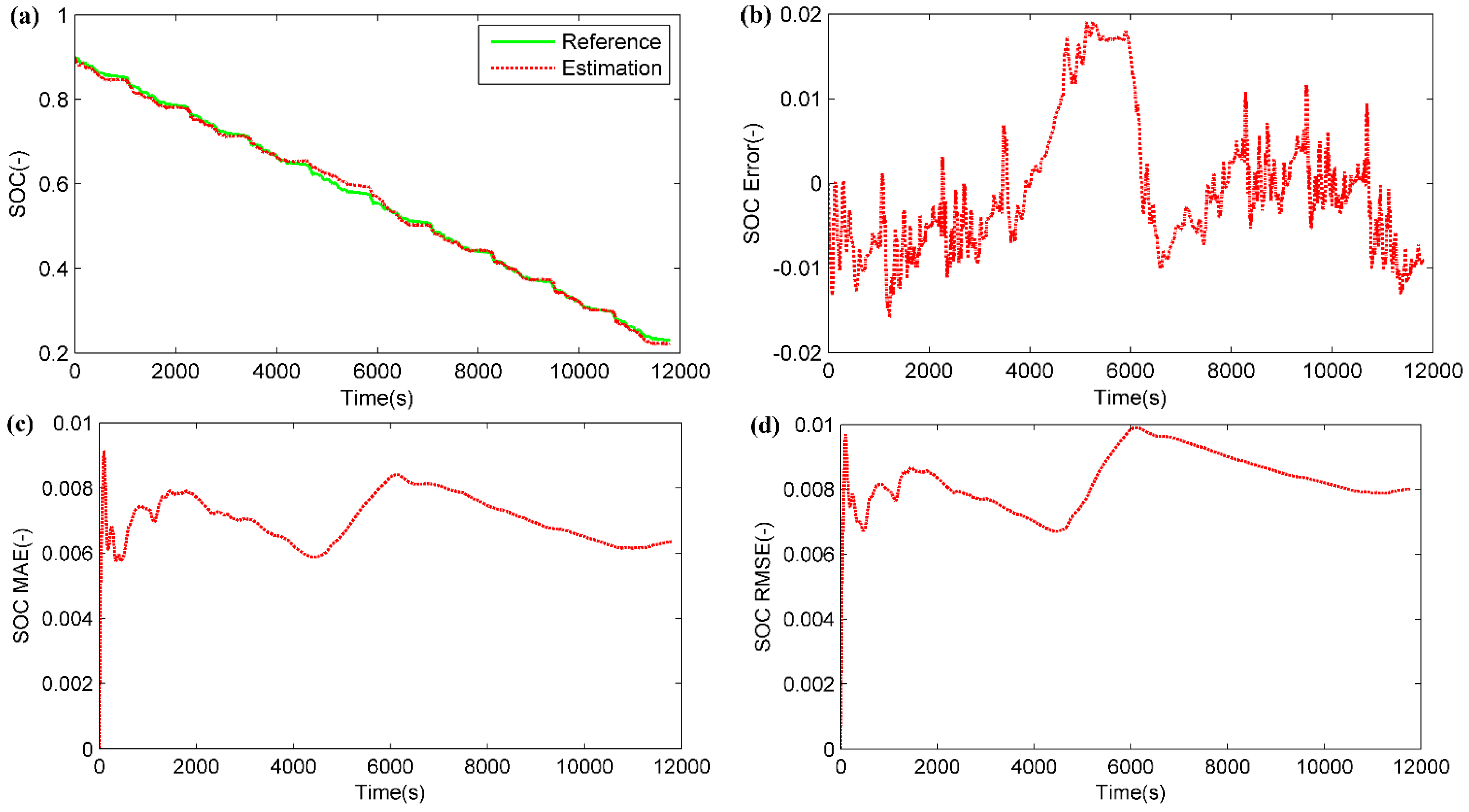
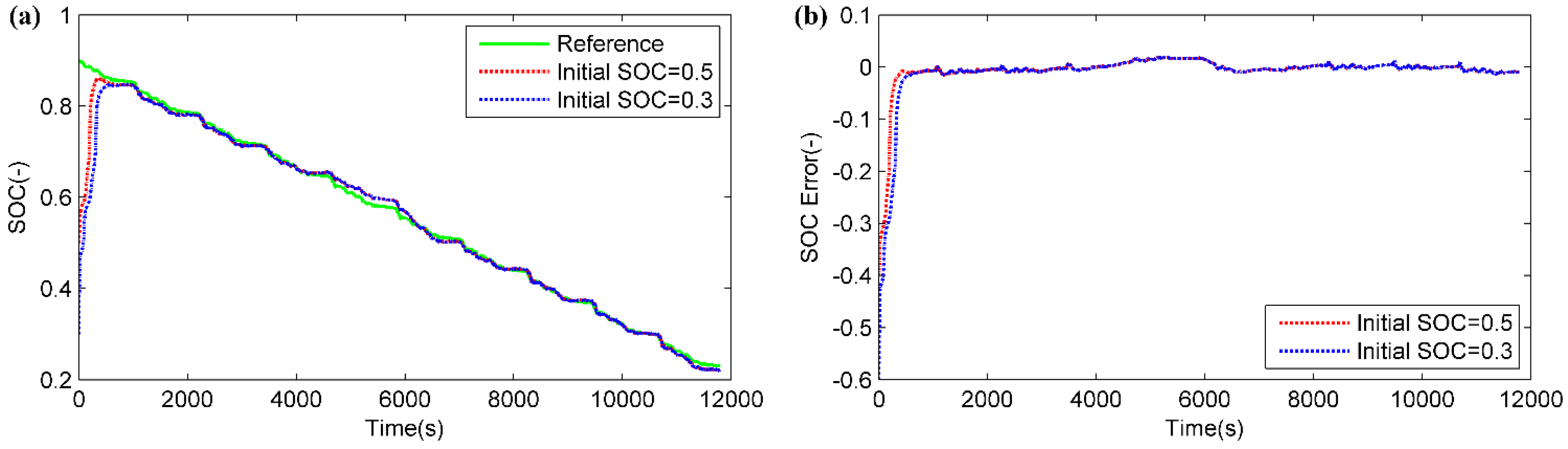
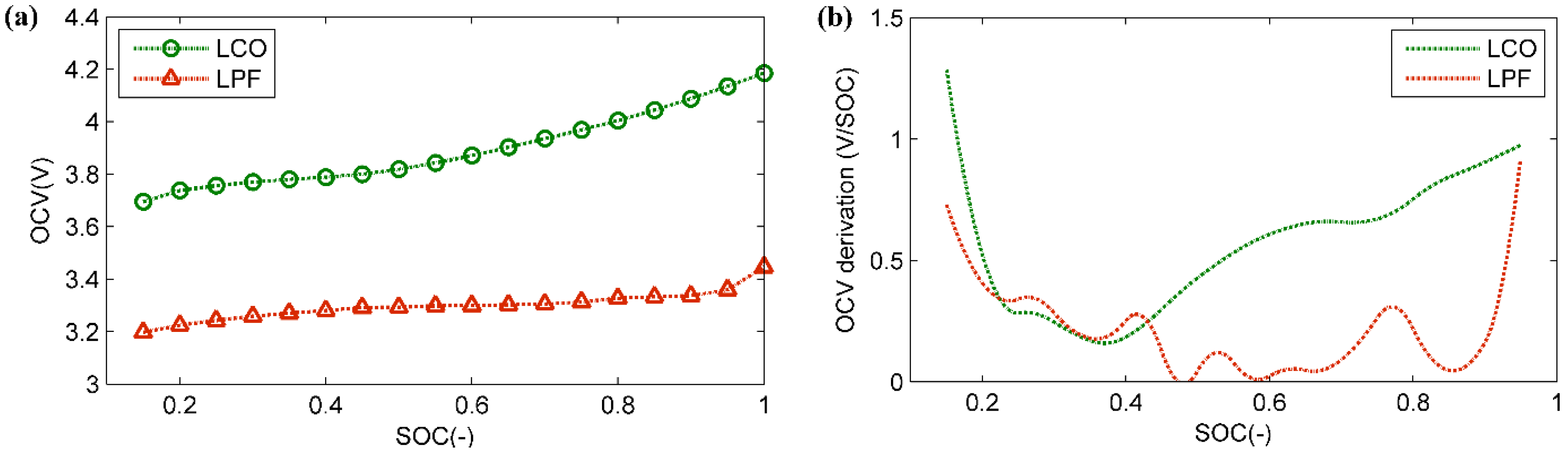
29]. In the NPF method, the nonlinear dynamic system is treated as a preliminary model with a to-be-determined model error part, where the preliminary model describes the system dynamic and the model error mainly represents the system process noise. The significant advantage of NPF method is that the process noise is treated as an unknown model error determined as a part of the solution, and it is able to represent any distribution form. Compared to the aforementioned direct measurement based estimation method, the NPF method can provide more accurate results with better robust performance of initial values due to its capability of correcting the state error online. In comparison with black-box model based method, the large amount of training data sets is not required for NPF method which saves the computational effort. The KF based method usually assumes a zero mean white Gaussian process noise and requires the prior knowledge. In contrary, the process noise in NPF can be any type without any restricting pre-assumptions. Therefore, the NPF based SOC estimation method has better estimation performance and is more practical for real-world applications. Compared to the PF method, the NPF method has lower computation, since a large number of particles needs to be used and numerous matrix operations are required for PF method which greatly increase the requirements for hardware system. Additionally, the aforementioned literatures mainly perform their methods on one type of batteries; the robustness performance of different battery types is not discussed. In this study, the NPF method is performed on LiCoO
2 (LCO) and LiFePO
4 (LFP) battery cells, the experimental results show that the NPF based method can accurately estimate the battery SOC with good robustness to different initial values. Meanwhile, the estimation result of LFP battery suffers from a lower accuracy than that of LCO battery due to the characteristics of the flat open circuit voltage. Furthermore, the comparison study between NPF and EKF with the same experimental conditions indicates that the proposed NPF method has better estimation accuracy and faster convergence rate.
The rest of the paper is organized as follows. In
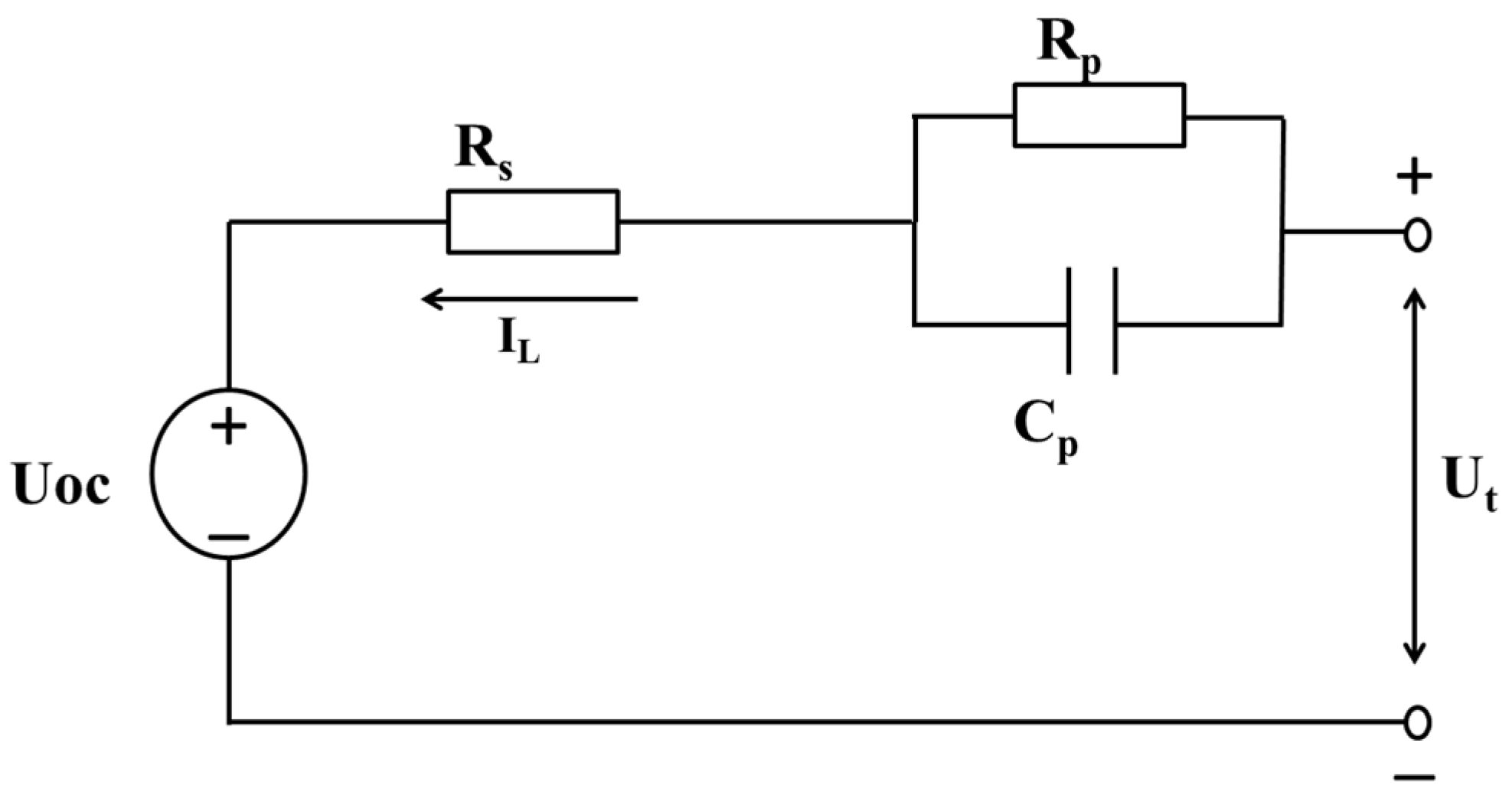
Section 2, a first-order equivalent circuit battery model is introduced. The description for SOC estimation of the Li-ion battery cell using NPF is presented in
Section 3. In
Section 4, the estimation results are analyzed and discussed to verify the proposed method. Finally, the conclusion is provided in
Section 5.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














