
Abstract
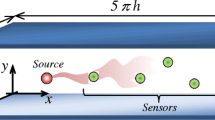
Wall-bounded turbulent flows can be challenging to measure within experiments due to the breadth of spatial and temporal scales inherent in such flows. Instrumentation capable of obtaining time-resolved data (e.g., hot-wire anemometers) tends to be restricted to spatially localized point measurements; likewise, instrumentation capable of achieving spatially resolved field measurements (e.g., particle image velocimetry) tends to lack the sampling rates needed to attain time resolution in many such flows. In this study, we propose to fuse measurements from multi-rate and multi-fidelity sensors with predictions from a physics-based model to reconstruct the spatiotemporal evolution of a wall-bounded turbulent flow. A “fast” filter is formulated to assimilate high-rate point measurements with estimates from a linear model derived from the Navier–Stokes equations. Additionally, a “slow” filter is used to update the reconstruction every time a new field measurement becomes available. By marching through the data both forward and backward in time, we are able to reconstruct the turbulent flow with greater spatiotemporal resolution than either sensing modality alone. We demonstrate the approach using direct numerical simulations of a turbulent channel flow from the Johns Hopkins Turbulence Database. A statistical analysis of the model-based multi-sensor fusion approach is also conducted.














Similar content being viewed by others

Abbreviations
- \(\Delta t_f^{+}\) :
-
Non-dimensional sampling time of “fast” point measurements
- \(\Delta t_s^{+}\) :
-
Non-dimensional sampling time of “slow” field measurements
- \(\Delta x_1^+\) :
-
Non-dimensional streamwise spatial resolution
- \(\Delta x_2^+\) :
-
Non-dimensional wall-normal spatial resolution
- \(\epsilon \) :
-
2-D Root-mean-square error (RMSE)
- \(\epsilon _{x_1}\) :
-
Streamwise RMSE
- \(\epsilon _{x_2}\) :
-
Wall-normal RMSE
- \(\nu \) :
-
Kinematic viscosity
- \(A_-\) :
-
System dynamics operator backward in time
- \(A_+\) :
-
System dynamics operator forward in time
- \(G_-\) :
-
Weighting factor of the backward estimate
- \(G_+\) :
-
Weighting factor of the forward estimate
- \(L_{x_1}\) :
-
Streamwise window size of the PIV snapshot.
- N :
-
State dimension
- \(\mathbb {S}\) :
-
Subsampling matrix from states to point measurements
- \(SNR_f\) :
-
Point measurement signal to noise ratio
- \(SNR_s\) :
-
Field measurement signal to noise ratio
- \(T^+\) :
-
Total time duration of reconstruction
- \(\varvec{U}=[U(x_2),0,0]\) :
-
Wall-bounded turbulent flow mean profile
- h :
-
Half-channel height
- \(\ell \) :
-
Sampling time ratio of field measurements to point measurements
- m :
-
Number of point measurements
- \(n_{x_1}\) :
-
Streamwise grid point of PIV snapshots
- \(n_{x_2}\) :
-
Wall-normal grid point of PIV snapshots
- p :
-
pressure fluctuation
- q :
-
System states
- \(\hat{q}_-\) :
-
Backward-in-time estimate of states
- \(\hat{q}_+\) :
-
Forward-in-time estimate of states
- \(t^+\) :
-
DNS time step
- \(\varvec{u}=[u_1,u_2,u_3]\) :
-
Turbulent flow velocity fluctuation
- \(u_\tau \) :
-
Friction velocity
- \(v_f\sim \mathcal {N}(0, R_f)\) :
-
Point measurement noise with Gaussian distribution of zero mean and covariance matrix \(R_f\)
- \(v_s\sim \mathcal {N}(0, R_s)\) :
-
Field measurement noise with Gaussian distribution of zero mean and covariance matrix \(R_s\)
- \(w\sim \mathcal {N}(0, Q)\) :
-
Process noise with Gaussian distribution of zero mean and covariance matrix Q
- \((x_1,x_2,x_3)\) :
-
Three-dimensional coordinate system
- \(y_f\) :
-
“Fast” point measurements
- \(y_s\) :
-
“Slow” field measurements
References
Adrian, R.J.: Conditional eddies in isotropic turbulence. Phys. Fluids 22(11), 2065–2070 (1979)
Adrian, R.J.: Stochastic estimation of conditional structure: a review. Appl. Sci. Res. 53(3–4), 291–303 (1994)
Amaral, F.R., Cavalieri, A.V.G., Martini, E., Jordan, P., Towne, A.: Resolvent-based estimation of turbulent channel flow using wall measurements. arXiv:2011.06525v1 (2020)
Batchelor, G., Proudman, I.: The effect of rapid distortion of a fluid in turbulent motion. Q. J. Mech. Appl. Math. 7(1), 83–103 (1954)
Bonnet, J.P., Cole, D.R., Delville, J., Glauser, M.N., Ukeiley, L.S.: Stochastic estimation and proper orthogonal decomposition: complementary techniques for identifying structure. Exp. Fluids 17(5), 307–314 (1994)
Chevalier, M., Hœpffner, J., Bewley, T.R., Henningson, D.S.: State estimation in wall-bounded flow systems. Part 2. Turbulent flows. J. Fluid Mech. 552(1), 167–187 (2006)
Durgesh, V., Naughton, J.: Multi-time-delay LSE-POD complementary approach applied to unsteady high-Reynolds-number near wake flow. Exp. Fluids 49(3), 571–583 (2010)
Encinar, M.P., Jiménez, J.: Logarithmic-layer turbulence: a view from the wall. Phys. Rev. Fluids 4(11), 114603 (2019)
Fukami, K., Fukagata, K., Taira, K.: Super-resolution reconstruction of turbulent flows with machine learning. J. Fluid Mech. 870, 106–120 (2019)
Fukami, K., Fukagata, K., Taira, K.: Machine-learning-based spatio-temporal super resolution reconstruction of turbulent flows. J. Fluid Mech. 909, A9 (2021)
Graham, J., Kanov, K., Yang, X., Lee, M., Malaya, N., Lalescu, C., Burns, R., Eyink, G., Szalay, A., Moser, R., et al.: A web services accessible database of turbulent channel flow and its use for testing a new integral wall model for LES. J. Turbul. 17(2), 181–215 (2016)
Guezennec, Y.: Stochastic estimation of coherent structures in turbulent boundary layers. Phys. Fluids A Fluid Dyn. 1(6), 1054–1060 (1989)
Hunt, J.C., Carruthers, D.J.: Rapid distortion theory and the ‘problems’ of turbulence. J. Fluid Mech. 212, 497–532 (1990)
Illingworth, S.J., Monty, J.P., Marusic, I.: Estimating large-scale structures in wall turbulence using linear models. J. Fluid Mech. 842, 146–162 (2018)
Jiang, C.M., Esmaeilzadeh, S., Azizzadenesheli, K., Kashinath, K., Mustafa, M., Tchelepi, H.A., Marcus, P., Prabhat, Anandkumar, A.: MeshfreeFlowNet: a physics-constrained deep continuous space-time super-resolution framework. arXiv:2005.01463v2 (2020)
Jovanović, M.R., Bamieh, B.: Componentwise energy amplification in channel flows. J. Fluid Mech. 534, 145–183 (2005)
Kalman, R.: E. 1960. a new approach to linear filtering and prediction problems. Trans. ASME J. Basic Eng. 82, 35–45 (1960)
Kim, J., Bewley, T.R.: A linear systems approach to flow control. Annu. Rev. Fluid Mech. 39, 383–417 (2007)
Krishna, C.V., Wang, M., Hemati, M., Luhar, M.: Fusion of physics-based models with field measurements for turbulent flow reconstruction. In: 11th International Symposium on Turbulence and Shear Flow Phenomena, TSFP 2019 (2019)
Krishna, C.V., Wang, M., Hemati, M.S., Luhar, M.: Reconstructing the time evolution of wall-bounded turbulent flows from non-time-resolved PIV measurements. Phys. Rev. Fluids 5(5), 054604 (2020)
Manohar, K., Brunton, B.W., Kutz, J.N., Brunton, S.L.: Data-driven sparse sensor placement for reconstruction: demonstrating the benefits of exploiting known patterns. IEEE Control Syst. Mag. 38(3), 63–86 (2018)
Mokhasi, P., Rempfer, D., Kandala, S.: Predictive flow-field estimation. Physica D 238(3), 290–308 (2009)
Murray, N.E., Ukeiley, L.S.: Estimation of the flowfield from surface pressure measurements in an open cavity. AIAA J. 41(5), 969–972 (2003)
Naguib, A., Wark, C., Juckenhöfel, O.: Stochastic estimation and flow sources associated with surface pressure events in a turbulent boundary layer. Phys. Fluids 13(9), 2611–2626 (2001)
Nguyen, T.D., Wells, J.C., Mokhasi, P., Rempfer, D.: Proper orthogonal decomposition-based estimations of the flow field from particle image velocimetry wall-gradient measurements in the backward-facing step flow. Meas. Sci. Technol. 21(11), 115406 (2010)
Raffel, M., Willert, C.E., Scarano, F., Kähler, C.J., Wereley, S.T., Kompenhans, J.: Particle Image Velocimetry: A Practical Guide. Springer, Berlin (2018)
Savill, A.: Recent developments in rapid-distortion theory. Annu. Rev. Fluid Mech. 19(1), 531–573 (1987)
Simon, D.: Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches. Wiley, Hoboken (2006)
Taylor, J., Glauser, M.N.: Towards practical flow sensing and control via POD and LSE based low-dimensional tools. J. Fluids Eng. 126(3), 337–345 (2004)
Towne, A., Lozano-Durán, A., Yang, X.: Resolvent-based estimation of space-time flow statistics. J. Fluid Mech. 883, A17 (2020)
Tu, J.H., Griffin, J., Hart, A., Rowley, C.W., Cattafesta, L.N., Ukeiley, L.S.: Integration of non-time-resolved PIV and time-resolved velocity point sensors for dynamic estimation of velocity fields. Exp. Fluids 54(2), 1429 (2013)
Ukeiley, L., Murray, N., Song, Q., Cattafesta, L.: Dynamic surface pressure based estimation for flow control. In: IUTAM Symposium on Flow Control and MEMS, pp. 183–189. Springer (2008)
Van Nguyen, L., Laval, J.P., Chainais, P.: A Bayesian fusion model for space-time reconstruction of finely resolved velocities in turbulent flows from low resolution measurements. J. Stat. Mech. Theory Exp. 2015(10), P10008 (2015)
Zare, A., Jovanović, M.R., Georgiou, T.T.: Colour of turbulence. J. Fluid Mech. 812, 636–680 (2017)
Zhang, Y., Cattafesta, L., Ukeiley, L.: Spectral analysis modal methods (SAMMs) using non-time-resolved PIV. Exp. Fluids 61(226), 1–12 (2020)
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Luca Magri.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A: Sensor placement
Appendix A: Sensor placement
In this study, three different approaches are investigated for determining the arrangement of fast point sensors—encoded in the term \({\mathbb {S}}\)—for multi-sensor fusion: (1) uniformly distributed (UD) sensor placement, (2) model-uncertainty-based (MU) sensor placement, and (3) pivoted QR sensor placement. Each of these is described here.
The UD placement approach is the simplest of the three approaches considered. UD placement yields a uniform distribution of m fast point sensors throughout the domain. Sensors are evenly spaced from each other and from the domain boundaries along both the \(x_1\) and \(x_2\) directions. Although this approach does not take into account any flow physics, it provides a reasonable benchmark for comparison. The same UD approach was also considered in [33]. In order to maintain symmetry in the resulting placement, the number of sensors m is selected to be a perfect square. Here, we consider only \(m=9\) and \(m=16\), which are values determined for by the QR placement approach—to be described momentarily—and used here for direct comparison. The UD sensor placements for these two cases are plotted as black stars in Fig. 15, overlaid on a snapshot of the streamwise velocity fluctuations \(u_1\) at an arbitrary instant in time.

Uniformly distributed (UD) sensor arrangements with \(m=9\) and \(m=16\) fast point sensors—drawn as black stars—overlaid on an arbitrary snapshot of streamwise velocity fluctuations
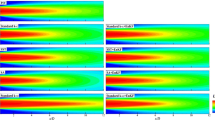
The UD method implicitly assumes that velocity fluctuations at all spatial points are equally important for flow reconstruction, which is not true in general. A simple means of addressing this shortcoming is to consider placing fast point sensors at locations with high reconstruction error, when a model-based reconstruction is used directly—i.e., a model-uncertainty-based (MU) placement strategy. In Fig. 16, we report wall-normal variation in error over time \(\epsilon (x_2,t)\) between the RDT-based reconstruction and JHTDB ground truth averaged over 50 realizations of the flow. The wall-normal variation in error over time is defined as
where \({\hat{u}}_1\) and \({\hat{u}}_2\) are the reconstructed velocity fluctuation in the streamwise and wall-normal components, and \(u_1\) and \(u_2\) are the velocity fluctuation components from the JHTDB ground truth. From this analysis, we find that the peak reconstruction error arises in the near-wall region, roughly \(x_2^+ \approx 100\) units from the lower channel wall. Since this indicates a large uncertainty in the RDT-model-based reconstruction, we distribute m fast point sensors uniformly along the streamwise direction at this wall-normal station, as shown in Fig. 17.

RDT-model-based reconstruction error (see Eq. 12) averaged over 50 realizations. The lower channel wall is located at \(x_2^+ = 0\), and the center line is located at \(x_2^+ = 1000\). The largest reconstruction error (the yellow area) arises at \(x_2^+ \approx 100\), near the lower wall (color figure online)

Model-uncertainty-based (MU) sensor arrangements with \(m=9\) and \(m=16\) fast point sensors—drawn as black stars—overlaid on an arbitrary snapshot of streamwise velocity fluctuations. Fast point sensors are uniformly distributed in the streamwise direction at a wall-normal station of \(x_2^+ = 100\), based on an analysis of the maximum model-based reconstruction error reported in Fig. 16
The final approach considered here is the sparse sensor placement algorithm based on a pivoted QR decomposition, as presented in [21]. The QR approach uses snapshots of the flow field to obtain a tailored (reduced) basis of POD modes for capturing dominant signals in the flow. Then, a column-pivoted QR factorization is used to construct \({\mathbb {S}}\), with the leading m column-pivots indicating the m sensor locations that will best approximate the training data in a least-squares sense. The specific formulation and additional details of the approach can be found in [21]. We emphasize that this QR approach requires training data for computing a tailored basis of POD modes, but that temporally resolved velocity field data will not be available in practice: This was the motivation for multi-sensor fusion in the first place. As such, we collect 200 slow-in-time snapshots of the flow field to extract a POD basis. The marginal contribution of each new POD mode to the energy in the training data is reported in Fig. 18. This cumulative energy analysis indicates that a tailored basis of \(r=16\) POD modes captures roughly 83% of the energy. Thus, a QR-based sensor placement on this tailored basis will require \(m=16\) sensors. We also consider a tailored basis of \(r=9\) POD modes (captured using \(m=9\) sensors) for comparison with the UD approach, which requires the number of sensors to be a perfect square to maintain symmetry. We note that the specific sensor arrangements resulting from the QR approach were found to be sensitive to the training data. This sensitivity was observed to be more significant with a larger number of sensors. However, even with sensitivities and variations in the sensor arrangements, a larger number of sensors were found to improve flow reconstruction so long as appropriate filter tuning was performed within the multi-sensor fusion framework. Due to these additional complexities, we only consider the cases of \(m=9\) and \(m=16\) sensors in this study.

Cumulative contribution of the leading r POD modes to the total energy of the training data. The leading 16 POD modes capture 83% of the energy in the training data, and the leading 9 POD modes capture 68%

QR sensor arrangements with \(m=9\) and \(m=16\) fast point sensors—drawn as black stars—overlaid on an arbitrary snapshot of streamwise velocity fluctuations. Sensor locations are chosen to capture maximal energy in the training data with a tailored basis of POD modes (see Fig. 18)
The sparse sensor arrangements resulting from the subsequent column-pivoted QR procedure for \(m=9\) and \(m=16\) sensors are shown in Fig. 19. Most of the sensors in these arrangements are placed in the vicinity of the lower wall. This confirms that the streamwise velocity fluctuations are a dominant feature of this flow that needs to be captured for flow reconstruction. Interestingly, near wall information was also found to be important using the MU placement approach. However, the MU approach resulted in a uniform streamwise distribution of sensors at a wall-normal station of \(x_2^+\approx 100\); in contrast, the QR placement tends to yield sensor locations with \(x_2^+<100\) and an irregular streamwise distribution of sensors, which would not have been obtained using simple heuristics.
Rights and permissions
About this article

Cite this article
Wang, M., Krishna, C.V., Luhar, M. et al. Model-based multi-sensor fusion for reconstructing wall-bounded turbulence. Theor. Comput. Fluid Dyn. 35, 683–707 (2021). https://doi.org/10.1007/s00162-021-00586-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00162-021-00586-8