





World Electr. Veh. J. 2024, 15(5), 184; https://doi.org/10.3390/wevj15050184 - 26 Apr 2024
Abstract
The suspension system is a crucial part of an electric vehicle, which directly affects its handling performance, driving comfort, and driving safety. The dynamics of the 8-DoF full-vehicle suspension with seat active control are established based on rigid-body dynamics, and the time-domain stochastic
[...] Read more.
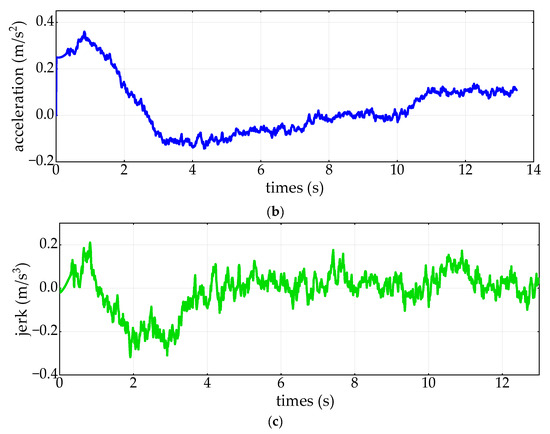
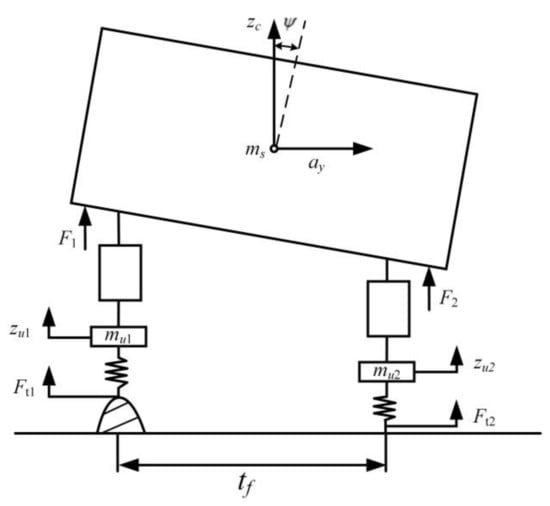
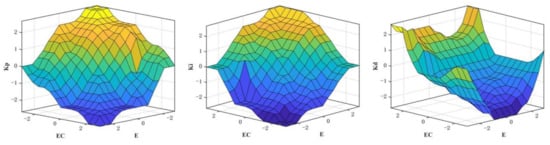
The suspension system is a crucial part of an electric vehicle, which directly affects its handling performance, driving comfort, and driving safety. The dynamics of the 8-DoF full-vehicle suspension with seat active control are established based on rigid-body dynamics, and the time-domain stochastic excitation model of four tires is constructed by the filtered white noise method. The suspension dynamics model and road surface model are constructed on the Matlab/Simulink simulation software platform, and the simulation study of the dynamic characteristics of active suspension based on the fractional-order PIλDµ control strategy is carried out. The three performance indicators of acceleration, suspension dynamic deflection, and tire dynamic displacement are selected to construct the fitness function of the genetic algorithm, and the structural parameters of the fractional-order PIlDm controller are optimized using the genetic algorithm. The control effect of the optimized fractional-order PIlDm controller based on the genetic algorithm is analyzed by comparing the integer-order PID control suspension and passive suspension. The simulation results show that for optimized fractional-order PID control suspension, compared with passive suspension, the average optimization of the root mean square (RMS) of acceleration under random road conditions reaches over 25%, the average optimization of suspension dynamic deflection exceeds 30%, and the average optimization of tire dynamic displacement is 5%. However, compared to the integer-order PID control suspension, the average optimization of the root mean square (RMS) of acceleration under random road conditions decreased by 5%, the average optimization of suspension dynamic deflection increased by 3%, and the average optimization of tire dynamic displacement increased by 2%.
Full article
(This article belongs to the Special Issue Design, Modelling and Control Strategies for Hybrid and Electric Vehicles)









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}